The code is commented in estonian and some variables are also in estonian
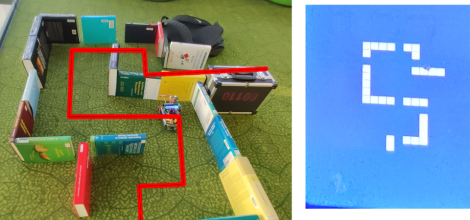
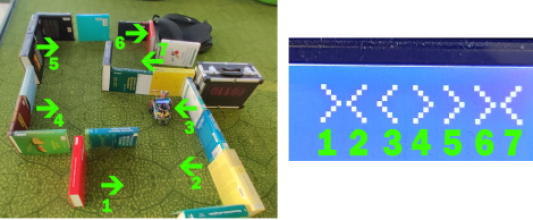
Tulemus: Robot sõidab “musta kasti” ehk raamatutest või pappkarbist ehitatud labürinti. Labürint peab olema koostatud nii, et robot ei saa sealt välja otse läbi sõites. Labürindi algus ja lõpp võivad olla tähistatud. Robot läbib labürindi kasutades liigutatavat ultraheli sensorit. Programmi töö alustamiseks peab kasutaja vajutama robotil olevat surunuppu. Kasutades liigutatavat ultraheli andurit suudab robot sõita “tunnelist” sisse ning kasti teisest otsast välja. Robot sõidab kasti sisse ning sõidab suunas, kus ultraheli sensor tuvastab kõige kaugema punkti. Robot on edukalt raja läbinud kui ta ei soorita valesid pöördeid ja jõuab teisest otsast välja. Lisaks peab robot oma pööretest kuvama info LCD ekraanile, lisaks ASCII nooltega näitama kummale pooole pöörati.
Ülesanne: Robot salvestab enda liikumise ning kuvab seda reaalajas LCD ekraanil. Labürindist väljudes peab olema selgelt näha valitud raja kujutis ning võimalusel lisatud juurde sooritatud manöövrid ASCII koodis nooltena.
Video with everything working - https://youtu.be/QR5cyshszuU

This was a university group project by Siim Tishler, Markus Visnapuu and Rannar Randmäe.