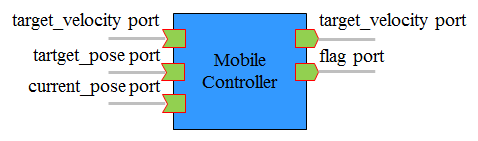
- When the target velocity input it will just output velocity
- When the target pose input it will control Kobuki moves to the postion
- The flag will be true if Kobuki arrives the target position
- OS
- Linux Distributions
- Windows
- Softwares
- OpenRTM-aist C++ 1.1 or later
- CMake 2.8
| Name | Type | Data Type | Purpose |
|---|---|---|---|
| target_velocity | In | RTC::TimedVelocity2D | The target velocity for the robot |
| target_pose | Out | RTC::TimedPose2D | The target pose for the robot |
| current_pose | In | RTC::TimedPose2D | The target pose for the robot |
| target_velocity | Out | RTC::TimedVelocity2D | The current pose of the robot |
| flag | Out | RTC::TimedBoolean | The arrival flag if the robot arrived the target pose |
Licensed under the Apache License, Version 2.0
Distributed under the MIT License.
Dual licensed under the MIT license and Apache License, Version 2.0.