Github个人仓库地址:https://github.com/whdwhd0/DeepDataMining
-
注册个人github账号

-
登录个人github账号。

-
建立一个仓库命名为DeepDataMining。

-
上传自己的PPT到DeepDataMining中。





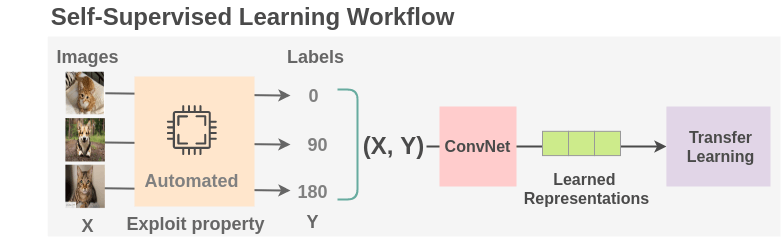
图 自监督端到端学习工作流程
- 自监督学习原理:
- 定义与动机:理解自监督学习的核心思想,即如何通过构建自我监督任务从无标签数据中学习有用的表征。
- 预训练与微调:熟悉自监督学习的两个主要阶段:使用自定义任务进行预训练,以及将预训练模型应用于下游任务(如缺陷检测)时的微调过程。
- 自监督学习方法:
- 对比学习:深入理解对比学习(Contrastive Learning)方法,如SimCLR、MoCo、SwAV等,掌握数据增强、编码、损失函数(如InfoNCE loss)的设计与作用。
- 掩码建模:学习基于掩码的自监督方法,如MAE、BEiT,理解如何通过掩码部分输入并预测缺失部分来学习表征。
- 生成式自监督:了解基于生成任务的自监督方法,如旋转预测、色彩恢复、上下文推理等,以及如何通过重构或预测某些图像属性来学习特征。
- 传统缺陷检测方法:
- 基础知识:理解缺陷检测的基本任务要求,包括异常检测、分类、定位与分割。
- 经典算法:了解传统的图像处理与机器学习方法,如阈值分割、模板匹配、纹理分析、SVM、Adaboost等,以及它们在缺陷检测中的应用。
- 深度学习在缺陷检测中的应用:
- 目标检测:掌握常见深度学习目标检测模型(如Faster R-CNN、YOLO、SSD)的工作原理和在缺陷检测中的适应性。
- 语义/实例分割:理解深度学习分割模型(如U-Net、FCN、Mask R-CNN)如何用于精确地识别缺陷区域。
-
自监督预训练:
- 选择与设计预训练任务:根据缺陷检测的具体需求,选择或设计合适的自监督学习任务,如对比学习中的图像对构建策略、掩码建模中的掩码策略等。
- 预训练数据准备:了解如何准备和处理无标签的缺陷样本或类似场景的数据,以用于自监督学习。
-
迁移学习与微调:
- 预训练模型选择:根据应用场景和硬件资源,选择适合的预训练模型架构(如ResNet、ViT等)及对应的自监督版本。
- 微调策略:学习如何针对缺陷检测任务调整模型架构(如有必要)、优化器设置、学习率策略、正则化方法等,并进行有监督微调。
-
自监督特征评估与应用:
-
特征可视化与分析:学习如何使用TSNE、UMAP等降维可视化方法,以及CAM、Grad-CAM等工具来理解自监督模型学到的特征表示。
-
性能评估:掌握适用于缺陷检测任务的评价指标,如精度、召回率、IoU、F1分数等,以及如何使用交叉验证、AUC-ROC曲线等方法来全面评估模型性能。
-
-
Pytorch框架:
1. 1模型构建
- 定义网络结构:利用
nn.Module类作为基类创建自定义网络,通过nn.Conv2d、nn.MaxPool2d、nn.ReLU等模块构建卷积层、池化层、激活函数等基础组件。对于自监督任务,可能还需要实现特定的自编码器(AutoEncoder)、多头自注意力(Multi-Head Attention)或Transformer等结构。 - 继承预训练模型:使用
torchvision.models库加载预训练的CNN模型(如ResNet、EfficientNet等),并可通过子类化这些模型来添加或修改特定层以适应自监督任务。例如,在预训练模型顶部添加自定义头部(head)用于特定任务的特征提取。
1.2 训练流程
- 前向传播:在模型类中定义
forward(self, x)方法,实现输入数据x经过网络各层的计算过程。这通常涉及逐层调用各模块的forward()方法,并可能包含自定义的中间计算步骤。 - 反向传播与梯度计算:使用
loss.backward()自动执行反向传播,计算模型参数相对于损失函数的梯度。确保在调用此方法前,模型处于训练模式(model.train())且设置了要求梯度(x.requires_grad_())。 - 权重更新:使用优化器(如
torch.optim.Adam、torch.optim.SGD)更新模型参数。在每个训练步骤后,调用optimizer.step()应用梯度更新,然后使用optimizer.zero_grad()清空梯度以准备下一轮迭代。
1.3 模型保存与加载
-
保存模型:使用
torch.save()将模型的权重(.state_dict())或整个模型(包括架构与权重)保存到文件。 -
加载模型:使用
torch.load()加载已保存的模型权重或整个模型。
- 定义网络结构:利用
-
TensorFlow框架:
2.1模型构建
- 定义网络结构:使用
tf.keras.layers模块构建卷积层(Conv2D)、池化层(MaxPooling2D)、激活函数(如ReLU)等。同样,对于自监督任务,可能需要实现自编码器、Transformer等复杂结构。利用tf.keras.Sequential或tf.keras.Model构建模型层级结构。 - 继承预训练模型:通过
tf.keras.applications导入预训练模型(如ResNet50、EfficientNetB0等),并可使用Model类对其进行扩展,添加或替换特定层以适应自监督任务。
2. 2训练流程
- 前向传播:在
call(self, inputs, training=None)方法中定义模型的前向传播逻辑。training参数指示当前是否处于训练模式,可根据此参数启用/禁用批次归一化层的更新、dropout等。 - 反向传播与梯度计算:使用
Model.compile()方法指定损失函数、优化器和评估指标,然后调用Model.fit()进行训练。反向传播和梯度计算由框架自动完成。 - 权重更新:在
compile()时指定优化器(如Adam、SGD),框架会在fit()过程中自动应用权重更新。
2. 2模型保存与加载
-
**保存模型:**使用Model.save_weights()保存模型权重,或使用Model.save()保存整个模型(包括架构与权重)。
-
加载模型:使用
Model.load_weights()加载已保存的模型权重,或直接使用tf.keras.models.load_model()加载整个模型。
- 定义网络结构:使用
-
数据处理:
- 数据加载:使用
torch.utils.data.Dataset和DataLoader接口封装数据集,实现批量数据读取与预处理。 - 图像操作:运用PIL、OpenCV等库进行图像裁剪、缩放、翻转、颜色空间转换等预处理操作。
- 数据增强:根据自监督任务特性,设计并实现合适的数据增强策略,如随机裁剪、色彩抖动、旋转、平移等,以增加模型的泛化能力。
- 数据加载:使用
-
数据集准备
- 数据收集:确定数据来源,可能包括公开数据集(如MVTec AD、Kaggle竞赛数据集等)、企业内部数据或自行采集。确保数据涵盖各类正常样本以及各种类型的缺陷。
- 数据清洗:去除无效、损坏或无关的图像,确保数据质量。对于有监督微调阶段,可能还需要进行标注工作,包括缺陷类别标注、边界框标注或像素级分割标注。
- 数据划分:合理划分数据集为训练集、验证集和测试集。对于自监督预训练,通常仅需大量无标签数据;若有监督微调,则需确保各集合均有对应的标签信息。
-
实验流程
自监督预训练阶段:
- 任务选择与实现:根据前期理论学习,选择适合缺陷检测的自监督任务(如对比学习、掩码建模),并在深度学习框架中实现相应的损失函数、数据增强策略、模型架构等。
- 模型训练:
- 设置合理的超参数,如学习率、批量大小、训练轮数等。
- 实施预训练,监控训练损失、验证指标(如自定义的自监督任务指标)以及模型收敛情况。
- 定期保存中间模型权重,以便后续分析与比较。
- 可视化学习到的特征表示,如通过PCA、t-SNE等降维方法观察特征分布变化,以初步评估预训练效果。
有监督微调阶段:
- 模型调整:根据缺陷检测任务特点,可能需要对预训练模型进行微调,如添加额外的输出层、调整最后几层的参数学习率、引入注意力机制等。
- 损失函数设定:定义适用于缺陷检测任务的损失函数,如交叉熵损失(分类)、L1/L2损失(回归)、Dice/Focal loss(不平衡分类)或IoU损失(分割)。
- 训练与评估:
- 使用预训练模型初始化权重,进行有监督微调。
- 监控训练损失、验证集上缺陷检测指标(如精度、召回率、IoU、F1分数等)。
- 利用学习率调度策略调整学习率,优化模型收敛速度与性能。
- 定期保存最优模型权重。
-
性能评估与模型比较
- 评估指标计算:根据任务类型(分类、定位、分割),计算相应的评估指标,如准确率、精确率、召回率、F1分数、IoU(Jaccard相似系数)等。
- 混淆矩阵分析:绘制并解读混淆矩阵,分析模型在各类别上的表现,包括假正例、假负例等,找出模型的强项与短板。
- AUC-ROC曲线与PR曲线:对于不平衡数据集,绘制AUC-ROC曲线和PR曲线,评估模型在不同阈值下的性能。
- 模型比较:对比不同自监督预训练策略(如不同的自监督任务、数据增强方案等)对最终缺陷检测性能的影响,选择最优模型。
- 学术文献追踪:
- 订阅相关领域的学术期刊、会议通知,如IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)、International Journal of Computer Vision (IJCV)、CVPR、ICCV、ECCV等。
- 使用Google Scholar、arXiv Sanity Preserver等工具,设置关键词警报,及时获取最新研究成果。
- 阅读并总结重要论文,理解其创新点、实验方法与结论,思考如何将新方法应用于自己的项目。
- 开源项目与代码复现:
- 关注GitHub上的热门计算机视觉与自监督学习项目,如
facebookresearch/dino、microsoft/MoCo-v3、google-research/simclr等。 - 参与或发起代码复现项目,通过实际编程实现论文中的算法,加深对理论的理解,同时锻炼编程与问题解决能力。
- 参与开源社区讨论,提问、解答他人问题,分享自己的实践经验,促进知识交流与个人成长。
- 关注GitHub上的热门计算机视觉与自监督学习项目,如