基于YOLOv8的智能垃圾分类识别系统,支持实时摄像头检测和图片上传检测,具有现代化的界面设计和完整的数据分析功能。
项目地址:https://mbd.pub/o/bread/YZWVl5ZwaA==
项目展示:[https://player.bilibili.com/player.html?aid=114845244464764]
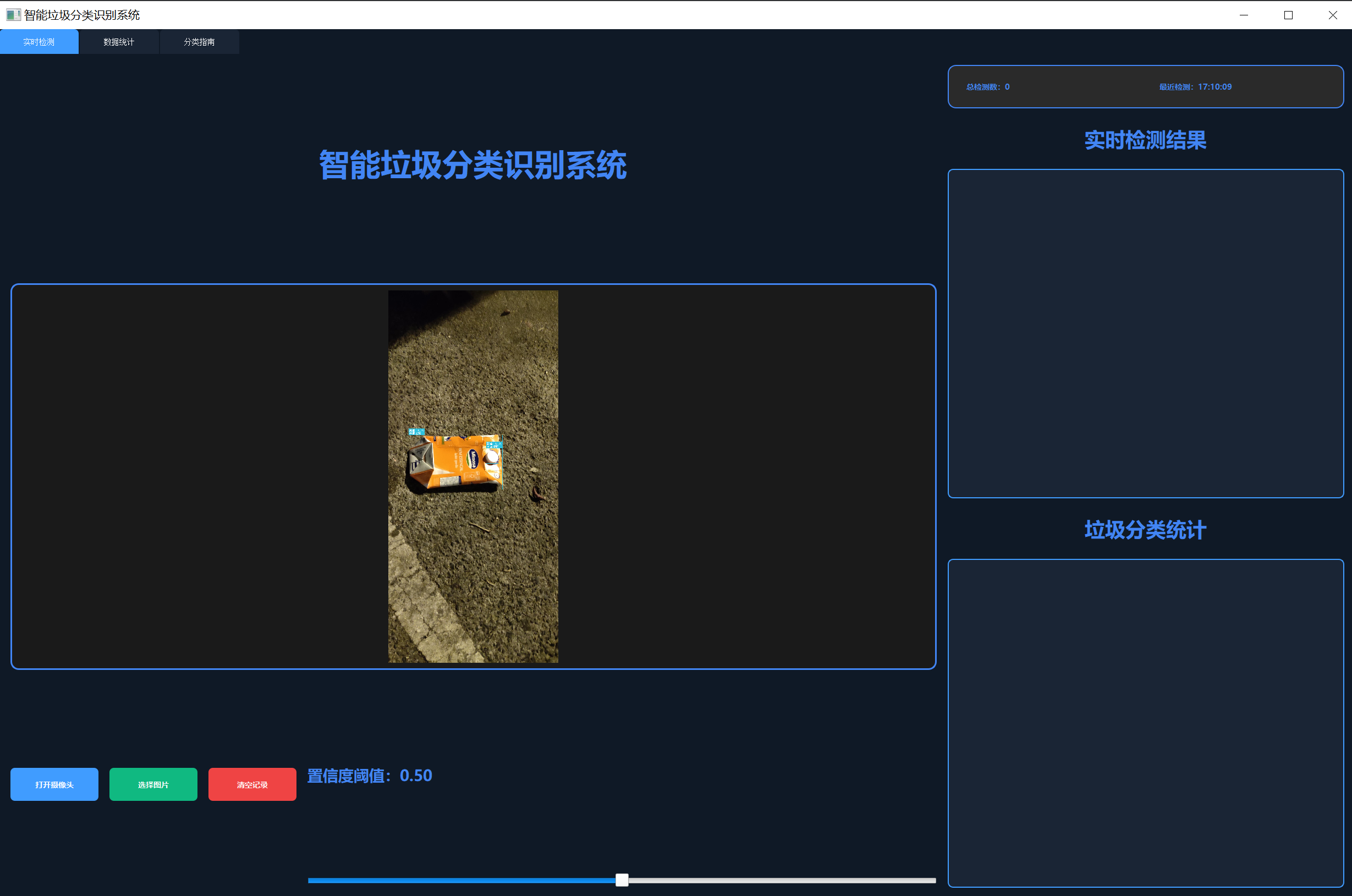
- 实时摄像头检测
- 图片上传检测
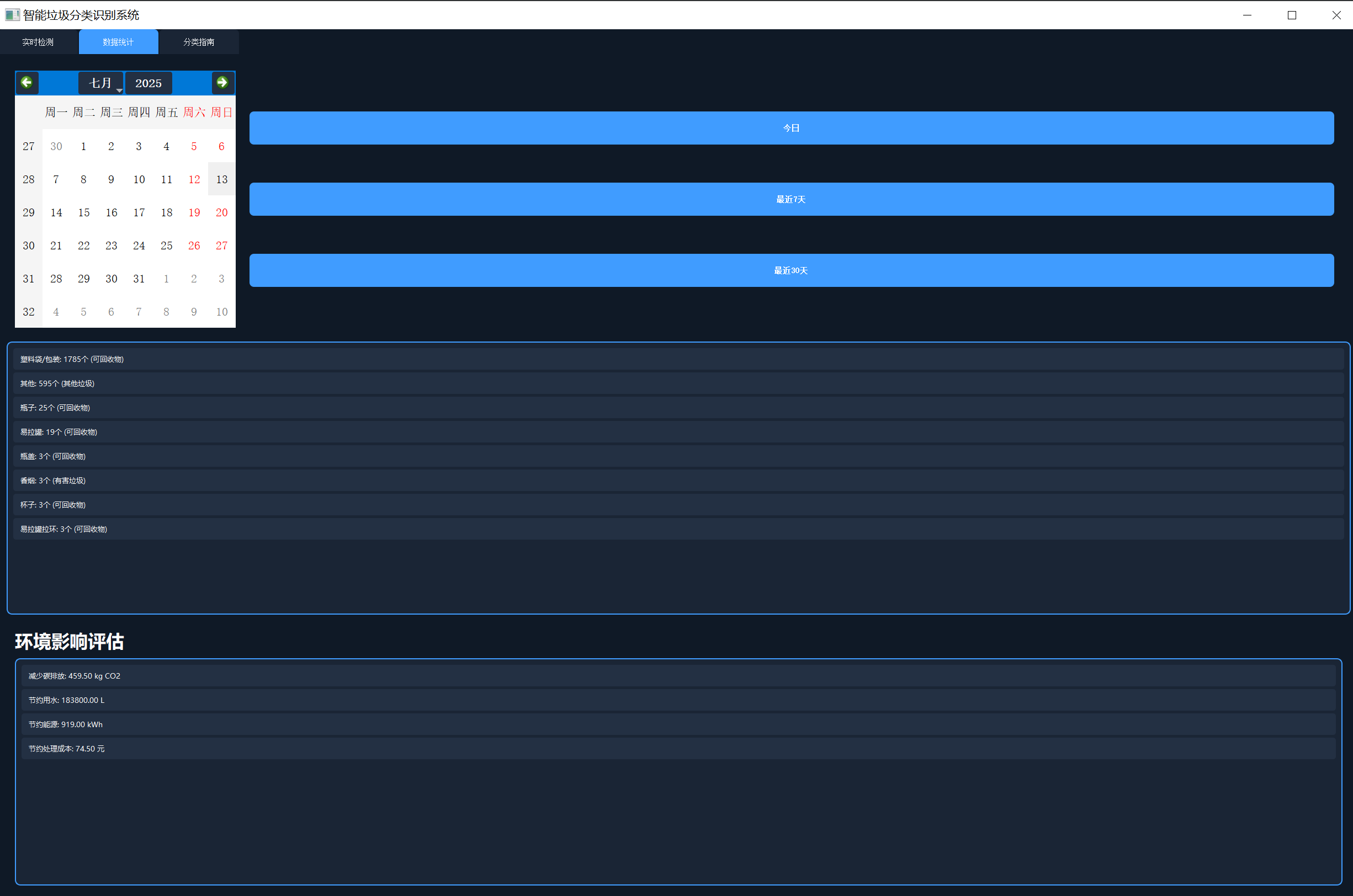
- 数据统计分析
- 环境影响评估
- 垃圾分类指南
- 现代化深色界面
- 中英文双语显示
数据集位于 yolo_dataset 目录下,包含以下内容:
- 图像数据:位于
images目录,包含1347张垃圾物品图片 - 标注数据:位于
labels目录,采用YOLO格式的txt文件 - 类别文件:
classes.txt定义了10个垃圾类别
- Bottle(瓶子)- 可回收物
- Bottle cap(瓶盖)- 可回收物
- Can(罐子)- 可回收物
- Cigarette(香烟)- 有害垃圾
- Cup(杯子)- 可回收物
- Lid(盖子)- 可回收物
- Other(其他)- 其他垃圾
- Plastic bag + wrapper(塑料袋和包装)- 可回收物
- Pop tab(易拉罐拉环)- 可回收物
- Straw(吸管)- 其他垃圾
- Python 3.8+
- CUDA支持(推荐,但不是必需)
- 摄像头(用于实时检测)
numpy>=1.21.0
opencv-python>=4.5.0
PyQt5>=5.15.0
ultralytics>=8.0.0
Pillow>=8.0.0
PyYAML>=5.4.0- 克隆项目到本地
git clone <repository_url>
cd garbage-classification- 创建虚拟环境(推荐)
python -m venv venv
# Windows
venv\Scripts\activate
# Linux/Mac
source venv/bin/activate- 安装依赖包
pip install -r requirements.txt-
准备数据集
- 将图片放入
yolo_dataset/images目录 - 将标注文件放入
yolo_dataset/labels目录 - 确保
classes.txt包含正确的类别信息
- 将图片放入
-
训练模型
# 使用训练脚本开始训练
python train.py- 训练完成后,模型将保存在
runs/detect/train目录下 - 将生成的最佳模型(best.pt)复制到项目根目录
- 启动系统
python main.py- 主要功能
- 实时检测:点击"打开摄像头"开始实时检测
- 图片检测:点击"选择图片"上传图片进行检测
- 数据统计:查看检测历史和统计信息
- 分类指南:了解各类垃圾的处理方法
def __init__(self):
# 初始化模型
self.model = YOLO('best.pt')
self.conf_threshold = 0.5
# 初始化摄像头
self.camera = None
self.timer = QTimer()
self.timer.timeout.connect(self.update_frame)def update_frame(self):
if self.camera is None:
return
ret, frame = self.camera.read()
if ret:
# 进行目标检测
results = self.model(frame, conf=self.conf_threshold)
# 在图像上绘制检测结果
frame = self.draw_detection_results(frame, results)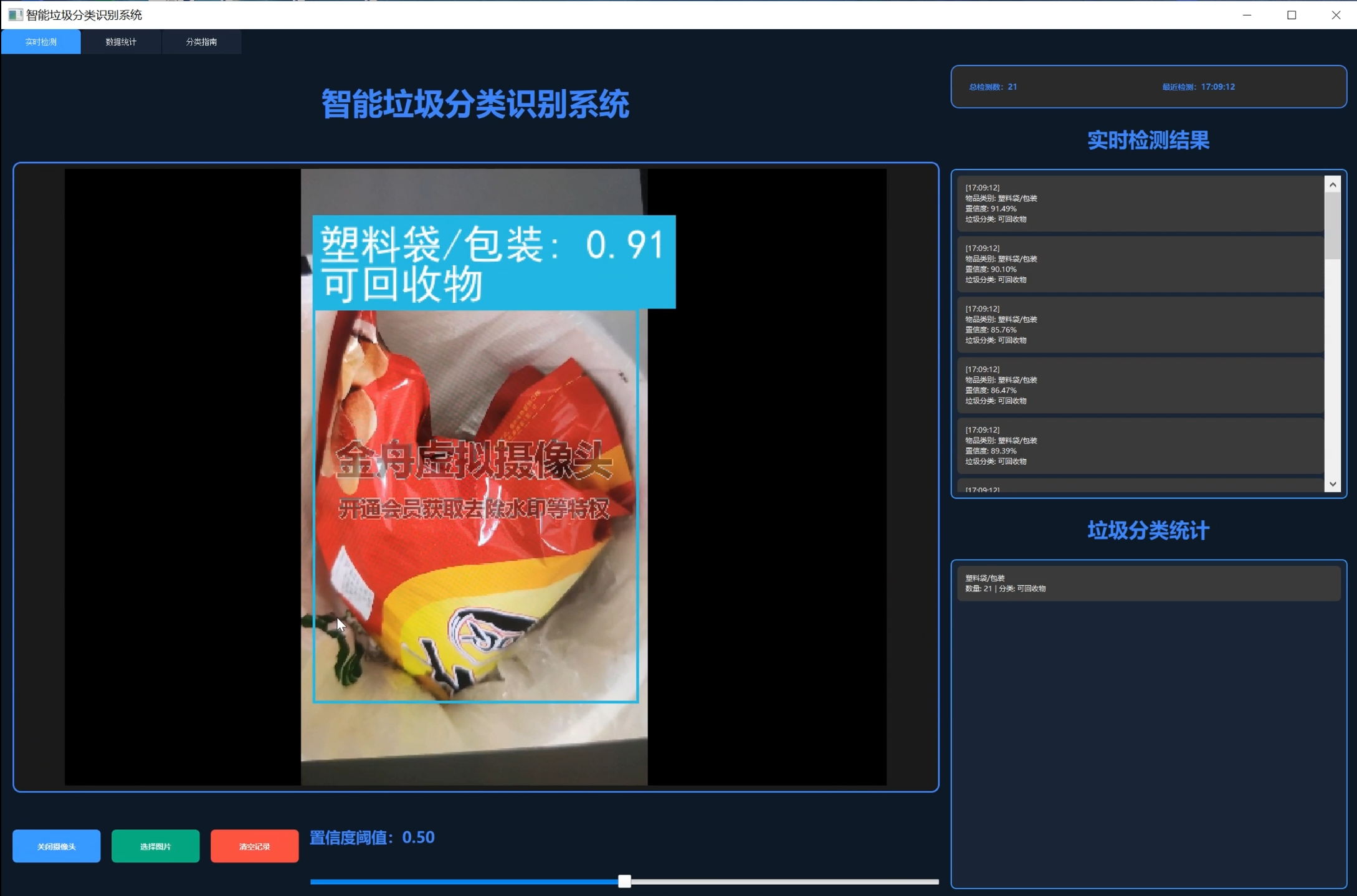
def draw_detection_results(self, image, results):
image_pil = PIL.Image.fromarray(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
draw = PIL.ImageDraw.Draw(image_pil)
for result in results:
boxes = result.boxes
for box in boxes:
# 获取检测框和类别信息
x1, y1, x2, y2 = box.xyxy[0].cpu().numpy()
conf = box.conf.cpu().numpy()[0]
cls = int(box.cls.cpu().numpy()[0])
cls_name = result.names[cls]
# 绘制检测框和标签
draw.rectangle([(x1, y1), (x2, y2)], outline=(46, 193, 222), width=2)def update_statistics(self):
self.stats_list.clear()
for cls_name, count in sorted(self.stats.class_counts.items(),
key=lambda x: x[1], reverse=True):
cls_name_cn = self.class_names_cn.get(cls_name, cls_name)
category = self.trash_categories.get(cls_name, '未分类')
stat_text = f"{cls_name_cn}\n数量: {count} | 分类: {category}"
item = QListWidgetItem(stat_text)
self.stats_list.addItem(item)graph TD
A[主程序入口] --> B[界面初始化]
B --> C[检测模块]
B --> D[统计模块]
B --> E[指南模块]
C --> F[实时检测]
C --> G[图片检测]
D --> H[数据统计]
D --> I[环境影响]
E --> J[分类指南]
E --> K[处理建议]
- 首次运行前确保已安装所有依赖包
- 使用摄像头功能时确保系统正确识别摄像头设备
- 如果使用GPU,请确保已安装CUDA和对应版本的PyTorch
- 建议使用1920x1080或更高分辨率的显示器以获得最佳显示效果
-
摄像头无法打开
- 检查摄像头设备是否正确连接
- 确认其他程序未占用摄像头
- 尝试重启系统
-
检测结果不准确
- 调整置信度阈值
- 确保光线充足
- 尝试使用更清晰的图片
-
中文显示乱码
- 确保系统安装了中文字体
- 检查
font目录下的字体文件