Replies: 1 comment
-
|
|
Beta Was this translation helpful? Give feedback.
0 replies
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Uh oh!
There was an error while loading. Please reload this page.
-
Hello,
I'm working on a concept of drone which is a Quad X with two independant motors and one servo.
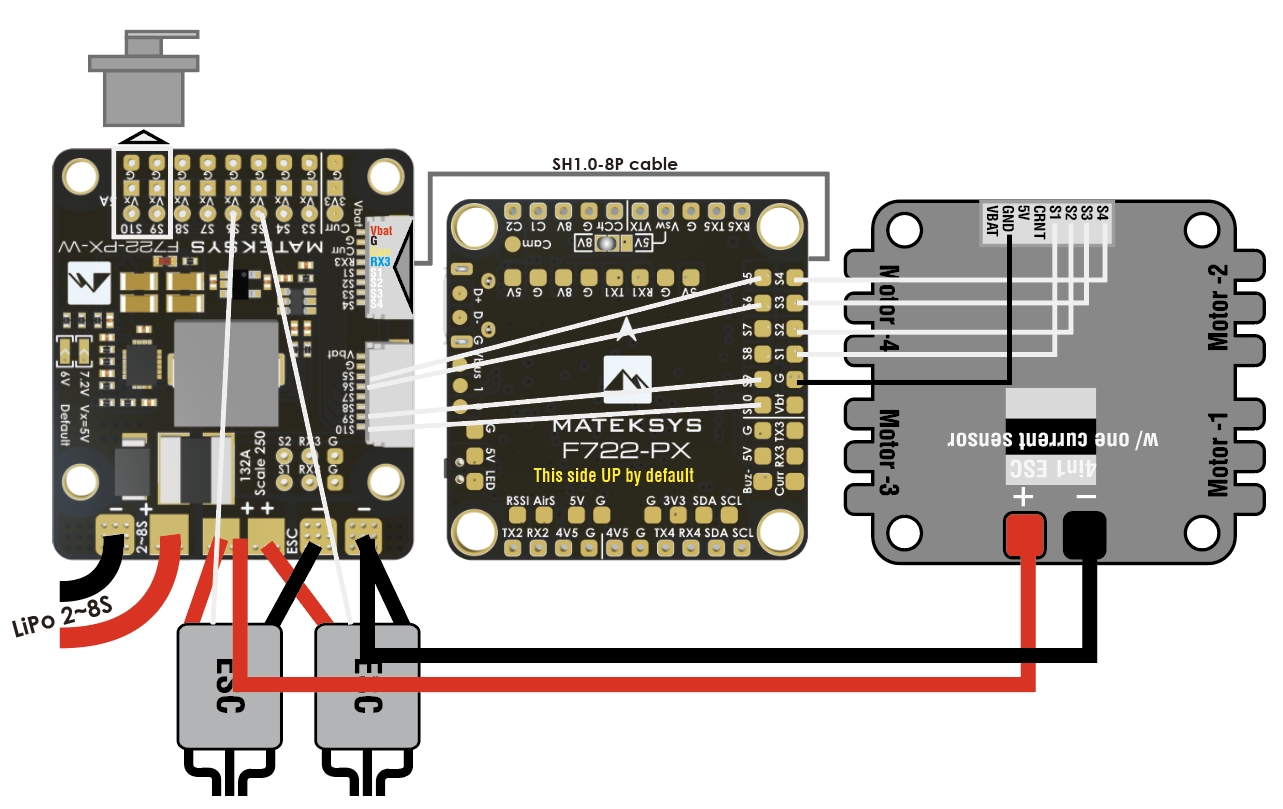
My flight controler is a Matek f722 PX.
I have an auroraRC 50a ESC with his four motors wiring
I have a PBD matek f722 px w were I connect a servo on s9 and two esc on s5 and s6.
the servo is use to tilt the camera.
I think about set the two esc to servo output chanel.
I tried so many things: keep motors 1, 2,3,4 and disable motors 5,6,7,8 by {resource motor # none} and I set {resource servo 1 B00}{resource servo 2 B01}{resource servo 3 B06}. These B** corresponding to pins of s5 s6 & s9.
On Betaflight I've only two servo working : I can get the servo use for tilt and one of the two independant motors. I'm not able to have all.
I tried to set a pins connexion to pwm with { resource Pwm # B00 } it don't work...
Does someone know how to use 3 servo output independant of the quad X mixer?
Beta Was this translation helpful? Give feedback.
All reactions