-
Notifications
You must be signed in to change notification settings - Fork 13
Updating to 20 10 #69
New issue
Have a question about this project? Sign up for a free GitHub account to open an issue and contact its maintainers and the community.
By clicking “Sign up for GitHub”, you agree to our terms of service and privacy statement. We’ll occasionally send you account related emails.
Already on GitHub? Sign in to your account
Closed
Closed
Changes from all commits
Commits
Show all changes
209 commits
Select commit
Hold shift + click to select a range
ba0808f
[DQ_SerialManipulatorDH] Adding the pose_jacobian_derivative method
juanjqo 4a14536
[DQ_SerialManipulatorDH] Adding the get_types method
juanjqo ce4ae84
[DQ_SerialManipulatorDH] Adding the get_alphas method
juanjqo 1c3304c
[DQ_SerialManipulatorDH] Adding the get_as method
juanjqo 400e619
[DQ_SerialManipulatorDH] Adding the get_ds method
juanjqo 68a5d85
[DQ_SerialManipulatorDH] Adding the get_thetas method
juanjqo 7ac9c49
[DQ_Kinematics] Adding the dim_configuration_space protected property
juanjqo 5931dd4
[DQ_Kinematics] Adding four protected properties: lower_q_limit_, upp…
juanjqo 85b0c6b
[DQ_Kinematics] Adding the protected methods check_to_ith_link and ch…
juanjqo b499704
[DQ_SerialManipulator] Making the class abstract.
juanjqo 28c758e
[DQ_Kinematics] Modified the property dim_configuration_space by dim_…
juanjqo 30e0969
[DQ_SerialManipulatorDH] Modified n_links by dim_configuration_space_
juanjqo 5545246
[DQ_SerialManipulatorDH] Modified n_links by dim_configuration_space_
juanjqo 782b1e9
[DQ_SerialManipulatorDH] Added the pose_jacobian_derivative method
juanjqo 32570af
Added a temproal file to perform some tests
juanjqo 2e3535f
[DQ_SerialManipulatorDH] Adding the protected property dh_matrix_
juanjqo 31c1bc2
[DQ_SerialManipulatorDH] Added the definition of the protected proper…
juanjqo ba9396f
[DQ_SerialManipulatorDH] Removed the properties theta, d, a, alpha. N…
juanjqo 7da4932
[DQ_SerialManipulatorDH] Removed the property type. Now we have dh_ma…
juanjqo f3c601b
[DQ_SerialManipulatorDH] Changed obj.type(ith) by joint_type = obj.dh…
juanjqo adaab4d
[DQ_SerialManipulatorDH] The property dh_matrix_ is not protected any…
juanjqo 6a059c8
[DQ_SerialManipulatorDH] Added a warning of deprecation when the user…
juanjqo 3571e57
[DQ_SerialManipulatorDH] Removed the fkm method from DQ_SerialManipul…
juanjqo 040b058
Updated the temporal file to perform tests.
juanjqo 9ff9dad
[DQ_SerialManipulator] Removed effector property. We have now curr_ef…
juanjqo 0afa2c4
[DQ_SerialManipulator] Modifying the constructor. Now it is required …
juanjqo b1e8309
[DQ_SerialManipulator] Removed the n_link property.
juanjqo 425694e
[DQ_SerialManipulator] Added the definition of the joint limits.
juanjqo 0d65e19
[DQ_SerialManipulator] Added the definition of the dim_configuration_…
juanjqo f3d11e1
[DQ_SerialManipulator] Removed the following properties: theta, d, a,…
juanjqo a2dd355
[DQ_SerialManipulator] Added raw_pose_jacobian and raw_fkm as abstrac…
juanjqo 7f01ddf
[DQ_SerialManipulator] Modified the get_dim_configuration_space to re…
juanjqo 507fe63
[DQ_SerialManipulator] Added the method get_effector() and modified t…
juanjqo 8aaea1f
[DQ_SerialManipulator] Added the following methods: get/set_lower_q_l…
juanjqo e518c76
[DQ_SerialManipulator] Removed the concrete raw_fkm method.
juanjqo 840363b
[DQ_SerialManipulator] Removed the method dh2dq from DQ_SerialManipul…
juanjqo 1fa5798
[DQ_SerialManipulator] Removed the method get_z().
juanjqo e403287
[DQ_SerialManipulator] Removed the concrete method raw_pose_jacobian.
juanjqo be302fa
[DQ_SerialManipulator] Removed the concrete method pose_jacobian_deri…
juanjqo 50ecdcc
[DQ_SerialManipulator] Updated effector by curr_effector_.
juanjqo 1805f5f
[DQ_SerialManipulator] Updated n_links by dim_configuration_space_.
juanjqo 2a69cf2
[DQ_SerialManipulator] Updated the parameters robot.a and robot.b use…
juanjqo 7041569
[DQ_SerialManipulatorDH] Updated the class to use the DQ_SerialManipu…
juanjqo dcccd94
Removed the temporal file DQ_SerialManipulator_.m
juanjqo 7a790df
[DQ_SerialManipulatorMDH] Added the class for the modified DH convent…
juanjqo 0d5930d
[DQ_SerialManipulatorDH] Updated the header documentation.
juanjqo a4f5228
[DQ_SerialManipulator] Updated the header documentation.
juanjqo d84e0c7
[DQ_SerialManipulatorMDH] Updated the get_w method taking into accoun…
juanjqo 89911e2
[DQ_SerialManipulatorMDH] Updated the get_w method using the dh_matri…
juanjqo 87bf50a
[DQ_SerialManipulatorMDH] Commented the line 260. I think that the po…
juanjqo 47f89e1
[DQ_SerialmanipulatorDH] Fixed the pose_jacobian_derivative. Now, the…
juanjqo c1d556d
[DQ_SerialmanipulatorMDH] Fixed bug in the get_w method.
juanjqo 9e64e59
[DQ_SerialmanipulatorMDH] Fixed bug in the pose_jacobian_derivative
juanjqo c7568ae
[DQ_SerialmanipulatorMDH] Fixed a bug in the get_w method.
juanjqo 3717c64
Added the FrankaEmikaPandaRobot using the Modified DH Convention.
juanjqo ecb7957
[DQ_Kinematics] Changed reference_frame and base_frame properties by …
juanjqo bb92c2b
[DQ_SerialManipulator] Updated the reference_frame and base_frame pro…
juanjqo 1d96476
[DQ_SerialWholeBody] Modified reference_frame by reference_frame_.
juanjqo b934255
[Ax18ManipulatorRobot] Removed the DH convention in DQ_SerialManipula…
juanjqo cea45f3
[BarretWamArmRobot] Removed the DH convention in DQ_SerialManipulator…
juanjqo 9ec6ab8
Changed DQ_SerialManipulator by DQ_SerialManipulatorMDH.
juanjqo fbd3a4f
[KukaLwr4Robot] Removed the DH convention in DQ_SerialManipulatorDH c…
juanjqo f00f7bd
[KukaYoubot] Removed the DH convention in DQ_SerialManipulatorDH cons…
juanjqo 4c8b235
Added the type of joints in the DH_matrix.
juanjqo c072c98
[DQ_WholeBody] Updated reference_frame by reference_frame_
juanjqo acb50de
[ComauSmartSixRobot] Added the type of joints in the DH_matrix.
juanjqo 5a0b808
[DQ_WholeBody] Updated reference_frame by reference_frame_
juanjqo aa204ec
Merge branch 'master' of https://github.com/juanjqo/matlab
juanjqo 730e331
[DQ_SerialManipulatorDH] The dh_matrix_ property now is protected.
juanjqo 0115688
[DQ_SerialManipulator] Used get_as() and get_ds() methods instead of …
juanjqo bfaf507
[DQ_SerialManipulatorMDH] The dh_matrix_ property is now protected
juanjqo 1025390
[DQ_SerialManipulatorDH] The methods get_w() and dh2dq() are now prot…
juanjqo 0e8fef1
[DQ_SerialManipulatorDH] Added comments in the get_w() method.
juanjqo 84429ac
[DQ_SerialManipulatorDH] Enhanced comments in the get_w() method.
juanjqo b97e527
[DQ_SerialManipulatorMDH] The methods get_w() and dh2q1() are now pro…
juanjqo 1425032
[DQ_Kinematics] Bug fixed in method check_to_ith_link().
juanjqo bedbb97
[DQ_SerialManipulatorDH] Added checkers in pose_jacobian_derivative.
juanjqo 0cad8ef
[DQ_SerialManipulatorDH] Added checkers in raw_fkm().
juanjqo 221b7f6
[DQ_Kinematics] The minimal input value of method check_to_ith_link()…
juanjqo 83bf80f
[DQ_SerialManipulatorDH] added checkers in raw_pose_jacobian().
juanjqo 06bca40
[DQ_SerialManipulatorMDH] Added checkers in pose_jacobian_derivative(…
juanjqo cb9cc8e
Merge branch 'dqrobotics:master' into master
juanjqo e5ca6d0
[DQ_SerialManipulatorDH] Added a minimal change in the comments to te…
juanjqo d802cd5
Merge branch 'dqrobotics:master' into master
juanjqo 5ee37c7
[DQ_SerialManipulatorMDH] Added a minimal change in the comments to t…
juanjqo 8b9dc52
[DQ_SerialManipulatorMDH] Added a minimal change in the comments to t…
juanjqo 55c9438
[KukaYoubotRobot] Modified the name of the robot to follow the same c…
juanjqo e98f542
[KukaYoubotRobot] Modified the name of the robot to follow the same c…
juanjqo 7451f64
Merge branch 'dqrobotics:master' into master
juanjqo 54080e4
[CONTRIBUTING.md] First commit of the contributing file.
juanjqo 5b3d70f
[CONTRIBUTING.md] Update the file.
juanjqo bc0e997
[CONTRIBUTING.MD] Added instructions to do a fork.
juanjqo 5f0cfbe
[CONTRIBUTING.md] Added changes in the contributing.md file.
juanjqo 4dca581
[CONTRIBUTING.md] Updated contributing.md
juanjqo 889b810
[CONTRIBUTING.md] Updated the contributing file
juanjqo 36fd172
[CONTRIBUTING.md] Updated the file.
juanjqo be90a4f
[CONTRIBUTING.md] Updated the file.
juanjqo b7aa723
[CONTRIBUTING.md] Updated the file.
juanjqo d0cacda
[CONTRIBUTING.md] Updated the file.
juanjqo 468ea1c
[CONTRIBUTING.md] Updated the file
juanjqo c62bd1a
[CONTRIBUTING.md] Fixed typos .
juanjqo 26a8886
[CONTRIBUTING.md] Updated the file.
juanjqo 588d7ba
[CONTRIBUTING.md] Updated the file.
juanjqo 7b00895
[CONTRIBUTING.md] Fixed a typo.
juanjqo 5800ce1
[CONTRIBUTING.md] Added a diagram.
juanjqo 085b2e8
[CONTRIBUTING.md] Updated the file.
juanjqo f5dbbdb
[CONTRIBUTING.md] Updated the diagram, as requested by Bruno.
juanjqo f902e84
[DQ_SerialManipulatorMDH.m] Updated the class according with the C++ …
juanjqo 82ca50a
[CONTRIBUTING.md] Updated the file.
juanjqo 1fd3cef
[DQ_SerialManipulatorMDH.m] Removed the deprecation in the constructor.
juanjqo eab54ca
[DQ_SerialManpulatorMDH] Updated the documentation.
juanjqo 1f9f224
[DQ_SerialManipulatorDH] Updated the documentation.
juanjqo 5684ded
[DQ_SerialManipulatorMDH] Updated the methods get_{thetas, as, alphas…
juanjqo f0c1f53
[DQ_SerialManipulatorMDH.m] Updated the class to use the new methods …
juanjqo 1227e30
[DQ_SerialManipulatorDH.m] Updated the class to use the new methods a…
juanjqo c3e8085
Revert "[DQ_SerialManipulatorDH.m] Updated the class to use the new m…
juanjqo d277fd9
Revert "[DQ_SerialManipulatorMDH.m] Updated the class to use the new …
juanjqo 1e42b9a
Revert "[DQ_SerialManipulatorMDH] Updated the methods get_{thetas, as…
juanjqo d40abac
[DQ_SerialManipulator] Removed the brackets in the description of the…
juanjqo 3157766
[CONTRIBUTING.md] Updated the file, with a better explanation about h…
juanjqo 15f1757
[CONTRIBUTING.md] Removed the emoticons
juanjqo 9a93cca
[CONTRIBUTING.md] Removed the period after the exclamation mark.
juanjqo d5175f8
[CONTRIBUTING.md] Modified the explanation about case 1.
juanjqo ff3a5b0
[CONTRIBUTING.md] Modified the explanation about case 2.
juanjqo 3eb8463
[CONTRIBUTING.md] Modified the explanation about case 2.
juanjqo 69d1240
[CONTRIBUTING.md] Modified Do by Make.
juanjqo 8325382
[CONTRIBUTING.md] Fixed typo
juanjqo 5cf3e67
[CONTRIBUTING.md] Modified the text in -Make your modifications.-
juanjqo efc3e41
Fixed a typo.
juanjqo 96e13a4
[DQ_SerialManipulator.m] Removed commented code.
juanjqo ffd5689
[DQ_SerialManipulator.m] The variable curr_effector_ is now private.
juanjqo f98ea68
[DQ_SerialManipulator.m] Remove the commented code.
juanjqo 6989074
[DQ_SerialManipulator.m] Remove commented code.
juanjqo 620a0ba
[DQ_SerialManipulator.m] Remove commented code.
juanjqo 55cf562
[DQ_SerialManipulator.m] Added a todo coment in the plot_options method.
juanjqo c31438e
[DQ_SerialManipulatorDH.m] Fixed the list of contributors.
juanjqo d5dc403
[DQ_SerialManipulatorMDH.m] Fixed the list of contributors.
juanjqo 6a28992
[DQ_SerialManipulatorDH.m] Added a todo comment.
juanjqo 7a03d83
[DQ_SerialManipulatorMDH.m] Added a todo comment.
juanjqo 7bbcae6
[DQ_SerialManipulatorDH.m] Removed commented code.
juanjqo b78f3d8
[DQ_SerialManipulatorDH.m] Updated the comments in some methods, as s…
juanjqo c58f73f
[DQ_SerialManipulatorDH.m] Updated the comments in some methods, as s…
juanjqo 1ab49eb
[DQ_SerialManipulatorDH.m] Updated the name of some methods, as propo…
juanjqo 7012eb8
[DQ_SerialManipulator.m] Updated the plot method to take into account…
juanjqo df92f06
[DQ_SerialManipulatorMDH.m] Updated the class.
juanjqo 57955b4
[DQ_SerialManipulatorDH.m] Modified the name of the type of joints.
juanjqo 1785e66
[ComauSmartSixRobot.m] Updated the type of joint.
juanjqo b3c3ce2
[Ax18ManipulatorRobot.m] Updated the type of joint.
juanjqo 3e1d4eb
[BarretWamArmRobot.m] Updated the type of joint.
juanjqo 8b04f76
[FrankaEmikaPandaRobot.m] Updated the type of joint.
juanjqo 3541ca9
[KukaLwr4Robot.m] Updated the type of joint.
juanjqo 62e49cd
[KukaYoubotRobot.m] Updated the type of joint.
juanjqo 51ae7d0
[DQ_SerialManipulatorDH.m] Fixed bug related to the name of the type …
juanjqo b0c3ce8
[DQ_SerialManipulatorDH.m] Modified the name ROTATIONAL by REVOLUTE.
juanjqo 782d711
[Ax18ManipulatorRobot.m] Updated the name of the joint.
juanjqo e56c89e
[BarrettWamArmRobot.m] Updated the type of joint.
juanjqo 705b51b
[ComauSmartSixRobot.m] Updated the type of joint.
juanjqo ab0623f
[FrankaEmikaPandaRobot.m] Updated the type of joint.
juanjqo 751cb95
[KukaLwr4Robot.m] Updated the type of joint.
juanjqo c411bfd
[KukaYoubotRobot.m] Updated the type of joint.
juanjqo 08eff5d
[DQ_SerialManipulatorDH.m] Updated the comments.
juanjqo ab50590
[DQ_SerialManipulatorMDH.m] Updated the type of joint.
juanjqo 0d477d8
[DQ_SerialManipulatorDH.m] Updated the comments in get_w method.
juanjqo 07b0cfb
[DQ_SerialManipulatorMDH.m] Updated the comments in get_w.
juanjqo 71af6e2
[DQ_SerialManipulatorDH.m] Added a citation of the JMR paper in get_w.
juanjqo 6ca3c18
[DQ_SerialManipulatorDH.m] Added a temporal comment to test github.
63f159e
[DQ_SerialManipulator.m] Modified curr_effector_ by effector_
58d5150
[DQ_SerialManipulator.m] Modified the intial comments explaning the c…
4512f59
[DQ_SerialManipulatorDH.m] Fixed the unoptimized calculations of the …
c384f38
[DQ_SerialManipulatorDH.m] Updated the names of some methods used to …
1fa4368
[DQ_SerialManipulator.m] Updated the name of methods used to get the …
aa23384
[DQ_SerialManipulatorMDH.m] Updated the comments of the class.
ce49d00
[DQ_SerialManipulatorDH.m] Fixed the dimension of the A matrix mentio…
078b86b
[DQ_SerialManipulatorMDH.m] Updated the class with respect to DQ_Seri…
aa39c7b
[DQ_SerialManipulatorDH.m] Fixed the comments of the get_joint_types …
73463f7
[DQ_SerialManipulatorMDH.m] Updated the class.
19bbba3
[DQ_SerialManipulatorDH.m] Modified the name of the method get_theta_…
66fa254
[DQ_SerialManipulatorMDH.m] Modified the name of the method get_theta…
35aa5aa
[DQ_SerialManipulatorDH.m] Removed unnecessary comented code.
b3aa5aa
[DQ_SerialManipulatorDH.m] Fixed the place of the check_to_ith_link m…
186f287
[DQ_SerialManipulatorMDH.m] Fixed the place of the check_to_ith_link …
0cc0049
[DQ_SerialManipulatorDH, MDH] Fixed the place of the check_to_ith_lin…
4b3425f
[FrankaEmikaPandaRobot.m] Updated the date.
e40fef0
[FrankaEmikaPandaRobot.m] Updated the website.
b82d182
[JointType.m] Added a new enumeration class to represent types of joi…
fe8f1ac
[DQ_JointType.m] Modified the name of the class.
26c6f7d
[DQ_SerialManipulatorDH.m] Added the properties JOINT_ROTATIONAL and …
3981e51
[DQ_JointType.m] Added numerical values to both enumerations to suppo…
5d8c301
[DQ_SerialManipulatorDH.m] Updated the class to include type of joint…
79b8156
[DQ_SerialManipulatorMDH.m] Updated the class wrt the DQ_SerialManipu…
6611e0f
[Ax18ManipulatorRobot.m] Updated the example using the new DQ_JointTy…
c466c3f
[BarrettWamArmRobot.m] Updated the robot using the new DQ_JointType c…
5ace358
[ComauSmartSixRobot.m] Updated the robot using the new DQ_JointType c…
2929335
[FrankaEmikaPandaRobot.m] Updated the robot using the new DQ_JointTyp…
7b431ac
[KukaLwr4Robot.m] Updated the robot using the new DQ_JointType class
170992e
[KukaYoubotRobot.m] Updated the robot using the new DQ_JointType class
c7ad8c0
[DQ_SerialManipulatorDH.m] Modified the raw_pose_jacobian method acco…
7cc7f62
[DQ_SerialManipulatorDH.m] Removed commented code.
7e2aa53
[DQ_SerialManipulatorMDH.m] Modified the raw_pose_jacobian method acc…
971f5ea
[DQ_SerialManipulatorDH.m] Modified ith by to_ith_link in pose_jacobi…
4e03c17
[DQ_SerialManipulatorMDH.m] Modified ith by to_ith_link in pose_jacob…
efe6b98
[DQ_SerialManipulatorDH.m] Added two new methods to return the robot …
638f0e8
[DQ_SerialManipulatorDH.m] Updated the parameter property according t…
ae15673
[DQ_SerialManipulatorDH.m] Improved the error messages of the class. …
f4dbf02
[DQ_SerialManipulatorDH.m] Improved the error messages of the class. …
82c059c
[DQ_SerialManipulatorMDH.m] Improved the error messages of the class.…
9321bd4
[DQ_SerialManipulatorDH.m] Modified the internal variable A in the co…
cbaa7ac
[DQ_SerialManipulatorDH.m] Fixed bug related to the modification of A…
42cc26c
[DQ_SerialManipulatorDH.m] Added a new struct property to take into a…
File filter
Filter by extension
Conversations
Failed to load comments.
Loading
Jump to
Jump to file
Failed to load files.
Loading
Diff view
Diff view
There are no files selected for viewing
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,69 @@ | ||
| # Welcome contributors to the DQ Robotics! | ||
|
|
||
| We are happy about your interest in our project. Thank you for your time. DQ Robotics is a standalone open-source library and your contributions are always welcome! | ||
|
|
||
| This is a set of guidelines for contribuiting to [DQ Robotics](https://dqrobotics.github.io/). | ||
|
|
||
| # Workflow | ||
|
|
||
| - Fork the [master branch of the dqrobotics/matlab](https://github.com/dqrobotics/matlab). | ||
| - Propose your modifications and open a draft pull request. | ||
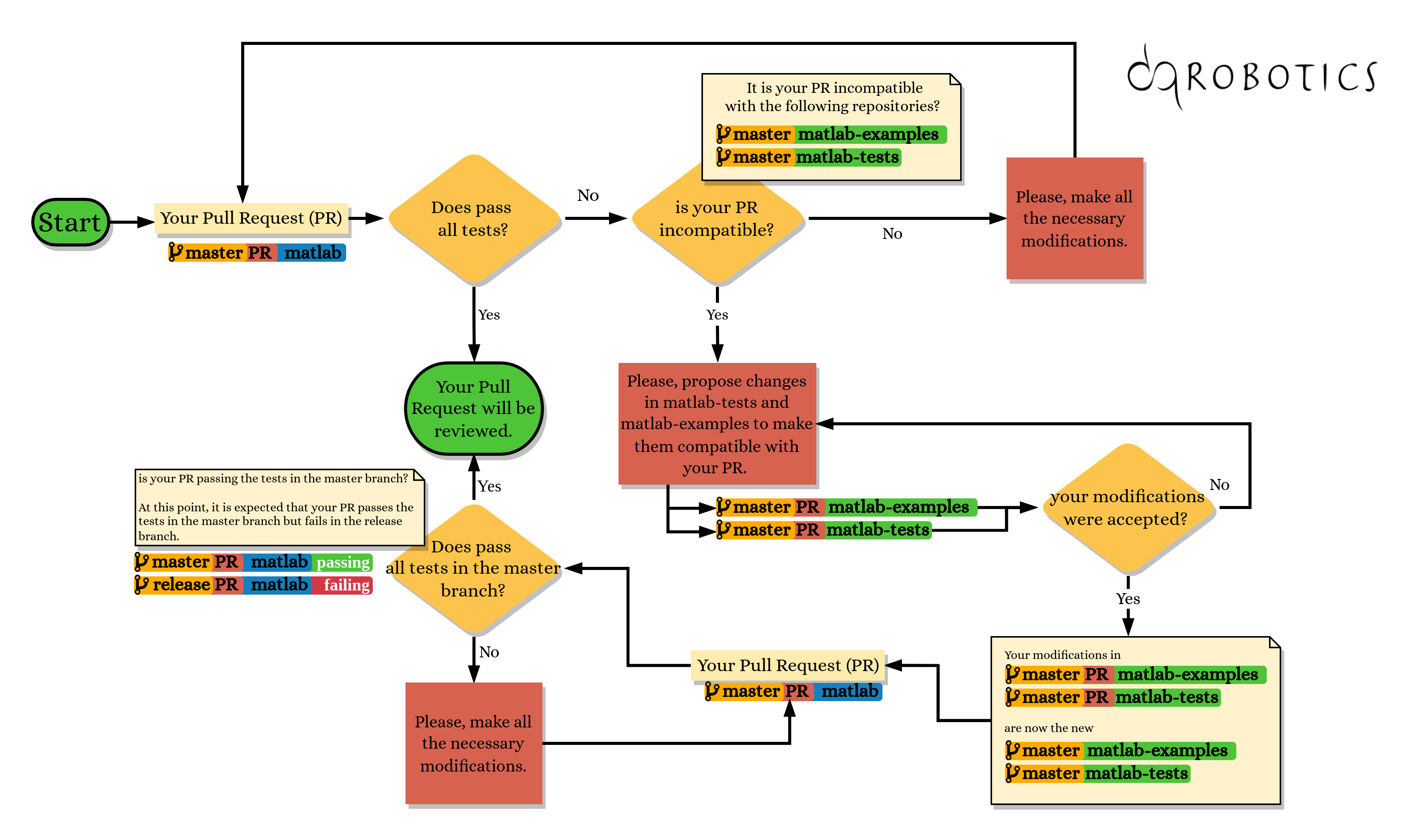
| - Your modifications will be tested automatically by Github actions. Specifically, Github actions runs the tests of [matlab-tests](https://github.com/dqrobotics/matlab-tests), which executes all the examples of [matlab-examples](https://github.com/dqrobotics/matlab-examples). | ||
| - Once your draft pull request passes all the tests, you can switch the status to pull request. (More details [here](https://github.blog/2019-02-14-introducing-draft-pull-requests/)). | ||
|
|
||
|  | ||
|
|
||
| ## Case 1 (Common cases) | ||
|
|
||
| - If your modifications pass all tests, a designated member of our team will review all the changes and they will accept them after all necessary adjustments if any. | ||
|
|
||
| ## Case 2 (Very rare cases) | ||
|
|
||
| - In some cases, your modifications would fail some tests because of incompatibility with the current version of [matlab-tests](https://github.com/dqrobotics/matlab-tests) and/or [matlab-examples](https://github.com/dqrobotics/matlab-examples). In thoses cases, you would propose changes in [matlab-tests](https://github.com/dqrobotics/matlab-tests) and [matlab-examples](https://github.com/dqrobotics/matlab-examples) to make them compatible with your new version of the dqrobotics/matlab. | ||
| - A designated member of our team will review all the changes proposed in both [matlab-tests](https://github.com/dqrobotics/matlab-tests) and [matlab-examples](https://github.com/dqrobotics/matlab-examples). They will accept the modifications in the master branch after all necessary adjustments. At this point, it is expected that your pull request passes all the tests in the master branch but fails in the release branch. | ||
|
|
||
|  | ||
|
|
||
| - Then, they will test your dqrobotics/matlab pull request making all necessary adjustments until your pull request of dqrobotics/matlab passes all the tests. After that, they will review deeply your modifications. | ||
| - Finally, your modifications will be accepted in the master branch. | ||
|
|
||
| # Example | ||
|
|
||
| ## Fork the [dqrobotics/matlab](https://github.com/dqrobotics/matlab) in your Github account | ||
|
|
||
|  | ||
|
|
||
| ## Clone the forked repository | ||
|
|
||
| For instance, if your forked matlab respository is https://github.com/juanjqo/matlab, then | ||
|
|
||
| Type in your terminal: | ||
|
|
||
| - `git clone https://github.com/juanjqo/matlab.git` | ||
|
|
||
|  | ||
|
|
||
| ## Make your modifications | ||
|
|
||
| Now, you can modify the code with your contributions. | ||
| (In this specific example, as shown in the GIF, I modified the CONTRIBUTING.md file) | ||
|
|
||
|  | ||
|
|
||
| ## Add, commit and push your changes | ||
|
|
||
| Please indicate in your commit's message the file that was modified using brackets. For instance, if you modified the class DQ_Serialmanipulator, then you would do the following: | ||
|
|
||
| - `git commit -m "[DQ_SerialManipulator] your_message_explaining_the modification."` | ||
|
|
||
|  | ||
|
|
||
| ## Open a draft pull request (More details [here](https://github.blog/2019-02-14-introducing-draft-pull-requests/)) | ||
|
|
||
| Now, your draft pull request will be tested by Github actions automatically. | ||
|
|
||
|  | ||
|
|
||
| If your pull request fails the tests, don't worry!, you will see where your code is not working. Pick your pull request in https://github.com/dqrobotics/matlab/pulls. Then, at the end of the page, click on 'Details'. | ||
|
|
||
|  |
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,31 @@ | ||
| % (C) Copyright 2022 DQ Robotics Developers | ||
| % | ||
| % This file is part of DQ Robotics. | ||
| % | ||
| % DQ Robotics is free software: you can redistribute it and/or modify | ||
| % it under the terms of the GNU Lesser General Public License as published | ||
| % by the Free Software Foundation, either version 3 of the License, or | ||
| % (at your option) any later version. | ||
| % | ||
| % DQ Robotics is distributed in the hope that it will be useful, | ||
| % but WITHOUT ANY WARRANTY; without even the implied warranty of | ||
| % MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the | ||
| % GNU Lesser General Public License for more details. | ||
| % | ||
| % You should have received a copy of the GNU Lesser General Public License | ||
| % along with DQ Robotics. If not, see <http://www.gnu.org/licenses/>. | ||
| % | ||
| % DQ Robotics website: dqrobotics.github.io | ||
| % | ||
| % Contributors to this file: | ||
| % Juan Jose Quiroz Omana - juanjqo@g.ecc.u-tokyo.ac.jp | ||
|
|
||
| classdef DQ_JointType < double | ||
| enumeration | ||
| REVOLUTE (1) | ||
| PRISMATIC (2) | ||
| end | ||
| end | ||
|
|
||
|
|
||
|
|
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
Oops, something went wrong.
Add this suggestion to a batch that can be applied as a single commit.
This suggestion is invalid because no changes were made to the code.
Suggestions cannot be applied while the pull request is closed.
Suggestions cannot be applied while viewing a subset of changes.
Only one suggestion per line can be applied in a batch.
Add this suggestion to a batch that can be applied as a single commit.
Applying suggestions on deleted lines is not supported.
You must change the existing code in this line in order to create a valid suggestion.
Outdated suggestions cannot be applied.
This suggestion has been applied or marked resolved.
Suggestions cannot be applied from pending reviews.
Suggestions cannot be applied on multi-line comments.
Suggestions cannot be applied while the pull request is queued to merge.
Suggestion cannot be applied right now. Please check back later.
There was a problem hiding this comment.
Choose a reason for hiding this comment
The reason will be displayed to describe this comment to others. Learn more.
Why is this function named$i^{ \mathrm{th}}$ link is in the valid range, then the preposition to seems inadequate as it gives the impression that there is an iteration involved (e.g., "check from A to B").
check_to_ith_linkand notcheck_ith_link? If the goal is to check if theThere was a problem hiding this comment.
Choose a reason for hiding this comment
The reason will be displayed to describe this comment to others. Learn more.
I implemented the method using the same name as in C++. @mmmarinho do you have any comments?
Uh oh!
There was an error while loading. Please reload this page.
There was a problem hiding this comment.
Choose a reason for hiding this comment
The reason will be displayed to describe this comment to others. Learn more.
@juanjqo @bvadorno
The local variable it was checking was called
to_ith_link, first used in methods such asfkm(q,to_ith_link)andpose_jacobian(q,to_ith_link). These follow Bruno’s logic, because, for example, the local variable refers to the FKM up to a given link.The naming might not be the same as in MATLAB.
One way or the other, it might be a good chance to unify those even though they are all private/protected or local.
@juanjqo If in the C++ version the leading _ is missing on the method signature, please also add it there.