This PR proposes new methods to fix the bug #76 #80
Conversation
Updated the file with last Bruno's recommendations.
…pdated the constructor of the class.
…pdated the constructor.
…g the n_links property.
…ing the n_links property.
…an abstract method and defined its concrete version.
…e_jacobian_derivative.
…ing the modified DH convention.
[DQ_SerialManipulator.m] the Fixed error message of the constructor.
[DQ_SerialManipulator.m] Added comments in some lines.
[DQ_SerialManipulatorDH.m] Protected the methods get_w and dh2dq, as in C++.
[DQ_SerialManipulatorDH.m] Added minimal changes in the dh2dq method.
[DQ_SerialManipulator.m] Updated the year of the copyright
[DQ_SerialManipulatorDH.m] Updated the copyright.
[DQ_SerialManipulatorMDH] Removed the class. I will add it in a future PR.
- Fixed grammar problems across the file. - Added more information about longer commits.
Now, when ith==n_links the effector is not taken into account.
…cobian()" This reverts commit 4ee9ebd.
…to match pose_jacobian, as discussed in #75
… of abstract ones.
…pose_jacobian, and raw_pose_jacobian_derivative
…sign proposed by Murilo.
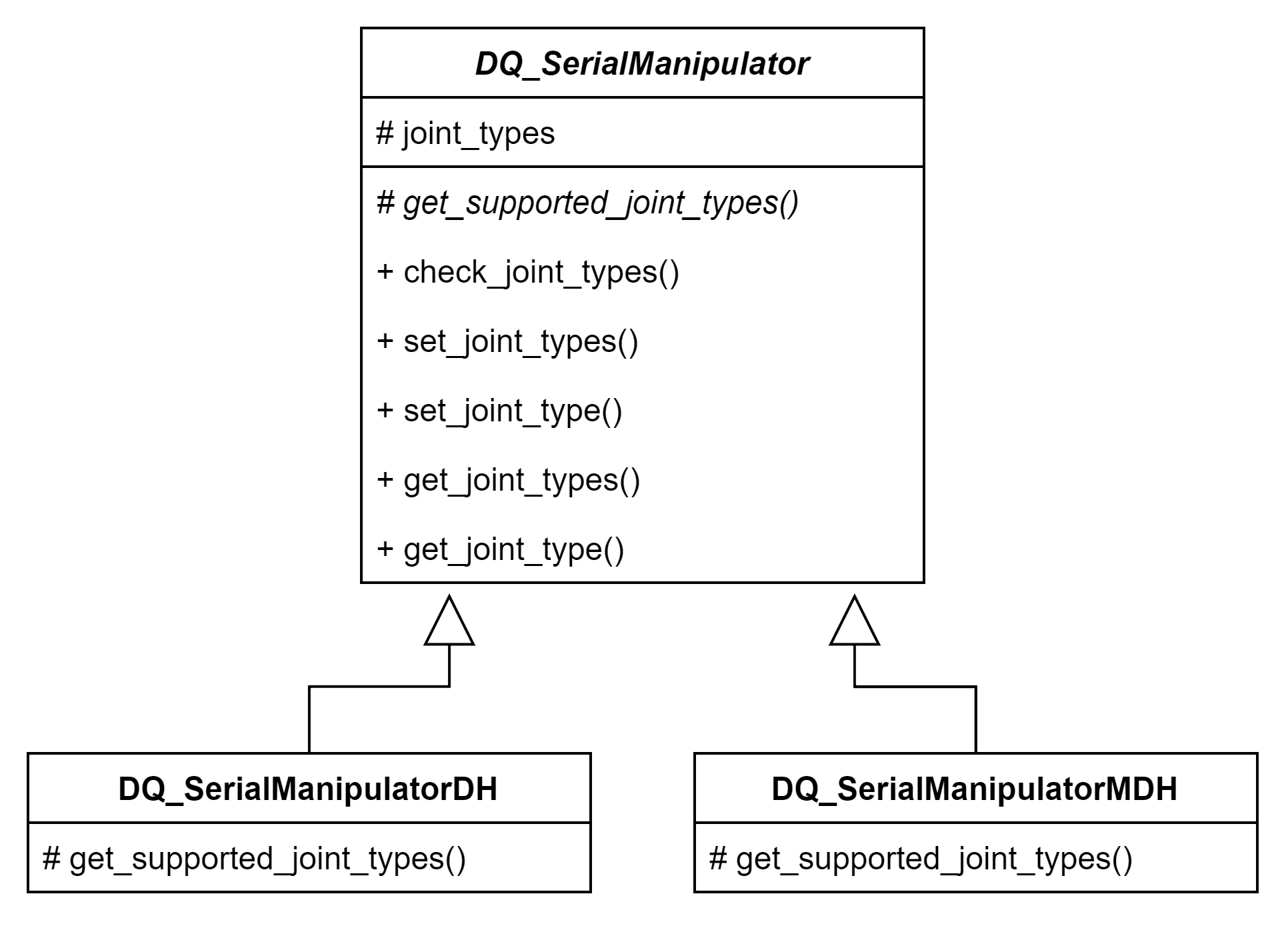
Conversion of DQ_SerialManipulator to an abstract class
[DQ_SerialManipulator] Added the protected property joint_types. Furthermore, I implemented the methods set_joint_types, set_joint_type, get_joint_types and get_joint_type. [DQ_SerialManipulatorDH, MDH] Updated the subclasses to comply the modifications made in DQ_SerialManipulator
[DQ_SerialManipulator] Added the abstract and protected method get_supported_joint_types(). [DQ_SerialManipulatorDH, MDH] Implemented the method get_supported_joint_types() in both subclasses to comply the modification in DQ_SerialManipulator.
|
Hi @juanjqo, I noticed that you modified the CONTRIBUTING.md file, but I'm not sure what the modifications are concerning the version currently in the MASTER repository. Please clarify. Best, |
I guess I understand what happened. After I rebased pull request #75, the commit messages of this pull request of yours got in the way. Somehow, the diff tool might not be working properly. Two clues make me believe that. First, this pull request still has the commit messages from before the rebasing. Second, it indicates that you want to add the I'm going to reject this pull request. Then, update your branch and open a new pull request. Thanks, |
@dqrobotics/developers
Hi @bvadorno,
This PR proposes the following modifications to fix #76 :
typefrom subclassesDQ_SerialManipulatorDHandDQ_SerialManipulatorMDH. Added the protected propertyjoint_typesinDQ_SerialManipulator. Motivations:obj.joint_typesis a property common to all subclasses, likeobj.n_joints.set_joint_types(and get_joint_types, both added in this PR) there is no need to keep the property public. (Currently, the user can freely get and set the propertyobj.type.UML:
Example of use:
Minimal example used in #76
Output:
Error using DQ_SerialManipulator/check_joint_types Unsupported joint types. Use valid joint types: DQ_JointType.REVOLUTE, DQ_JointType.PRISMATIC. Error in DQ_SerialManipulator/set_joint_types (line 146) obj.check_joint_types(); Error in DQ_SerialManipulatorDH (line 196) obj.set_joint_types(A(5,:)); Error in untitled2 (line 30) ax = DQ_SerialManipulatorDH(ax18_DH_matrix)Best regards,
Juancho