Conversion of DQ_SerialManipulator to an abstract class #75
Conversation
Updated the file with last Bruno's recommendations.
…pdated the constructor of the class.
…pdated the constructor.
…g the n_links property.
…ing the n_links property.
…an abstract method and defined its concrete version.
…e_jacobian_derivative.
…ing the modified DH convention.
[DQ_SerialManipulator.m] the Fixed error message of the constructor.
[DQ_SerialManipulator.m] Added comments in some lines.
[DQ_SerialManipulatorDH.m] Protected the methods get_w and dh2dq, as in C++.
[DQ_SerialManipulatorDH.m] Added minimal changes in the dh2dq method.
[DQ_SerialManipulator.m] Updated the year of the copyright
[DQ_SerialManipulatorDH.m] Updated the copyright.
|
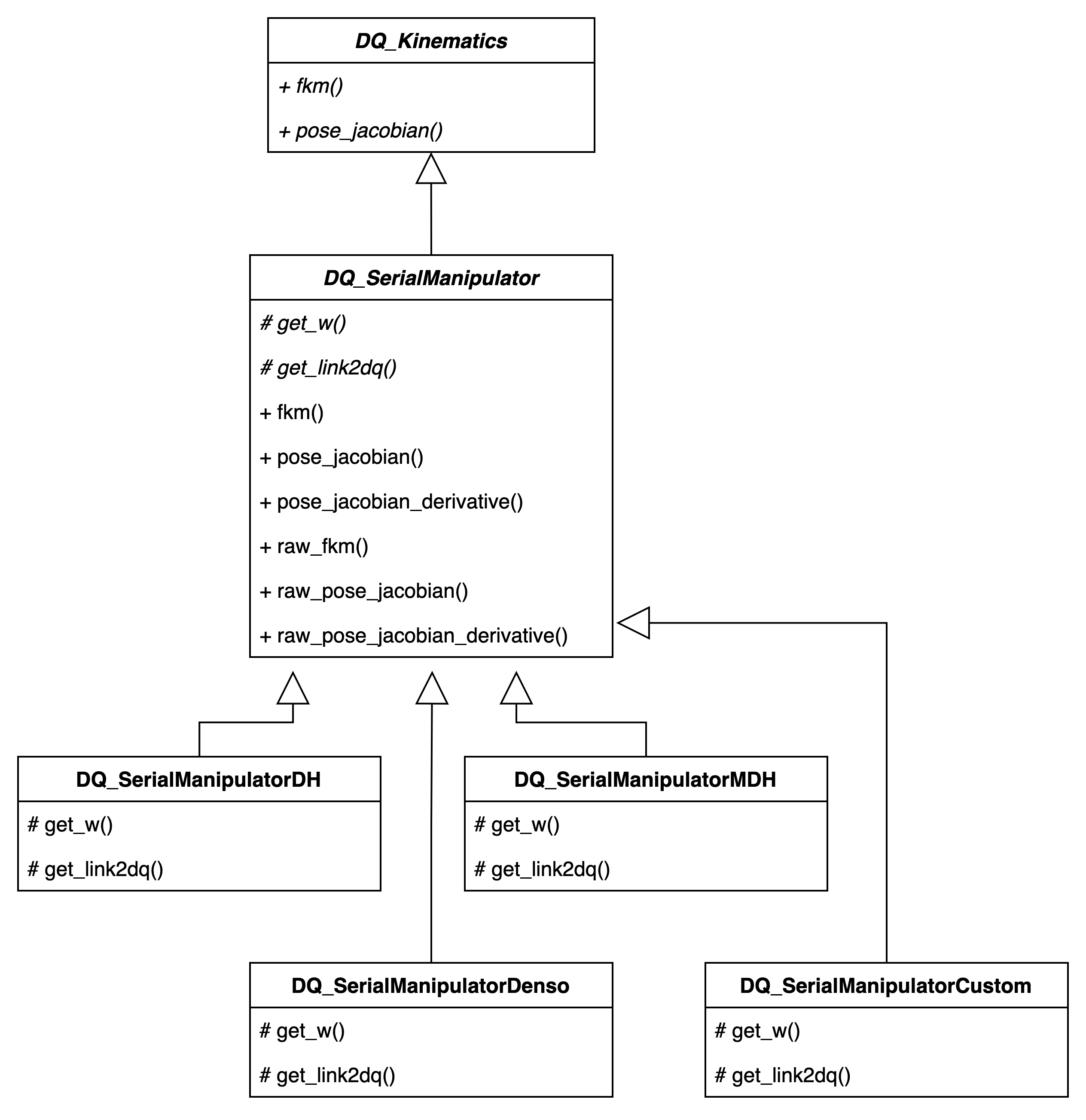
@dqrobotics/developers Hi @mmmarinho and @bvadorno, Assuming I'm not missing anything, this is the UML design proposed by Murilo.
Best regards, Juancho |
|
Hi @bvadorno and @mmmarinho Following our previous discussion, I have a proposal to modify the constructor of the subclasses. Instead of using a cell, we could have two arguments: a 4xn DH matrix and the type of joints. For instance: dh_matrix = [theta; d; a; alpha];
types = repmat(DQ_JointType.REVOLUTE, 1,5); % No casting to double
robot = DQ_SerialManipulatorDH(dh_matrix, types); The key justification is that while a cell might be simple to create in Matlab or (pure) Python, it might be challenging to do so in C++ without using a struct, and, looks like that somethings as structs or raw pointers (raw pointers are being replaced by smart pointers) are not being used in the current implementation of the library in C++, at least for public functions or methods. (@mmmarinho please correct me if I'm wrong). To ensure compatibility with previous versions, the constructor could be (this is a very raw beta implementation) function obj = DQ_SerialManipulatorDH(A, types)
obj.n_links = size(A,2);
str_new = ['DQ_SerialManipulatorDH(A, types), where ' ...
'A = [theta1 ... thetan; ' ...
' d1 ... dn; ' ...
' a1 ... an; ' ...
' alpha1 ... alphan;] ' ...
' ' ...
'types = [DQ_JointType.REVOLUTE ... DQ_JointType.PRISMATIC]'];
switch nargin
case 0
error(['Input: matrix whose columns contain the DH parameters' ...
' and type of joints. Example: ' str_new])
case 1
warning(['DQ_SerialManipulatorDH(A) is deprecated.' ...
' Please use DQ_SerialManipulatorDH(A, types) instead. Example: ' str_new]);
if(size(A,1) ~= 5)
error('Input: Invalid DH matrix. It must have 5 rows.')
end
obj.theta = A(1,:);
obj.d = A(2,:);
obj.a = A(3,:);
obj.alpha = A(4,:);
obj.type = A(5,:);
case 2
if isa( types, 'char') % ex: types = 'standard'
warning(['DQ_SerialManipulatorDH(A, convention) is deprecated.' ...
' Please use DQ_SerialManipulatorDH(A, types) instead. Example: ' str_new]);
if(size(A,1) ~= 5)
error('Input: Invalid DH matrix. It must have 5 rows.')
end
obj.theta = A(1,:);
obj.d = A(2,:);
obj.a = A(3,:);
obj.alpha = A(4,:);
obj.type = A(5,:);
elseif strcmp(class(convention), 'DQ_JointType')
if(size(A,1) ~= 4)
error('Input: Invalid DH matrix. It must have 4 rows.')
end
obj.theta = A(1,:);
obj.d = A(2,:);
obj.a = A(3,:);
obj.alpha = A(4,:);
obj.type = types;
elseif isa(obj.type, 'double')
warning(['bla bla bla. Use DQ_JoinType instead.'])
if(size(A,1) ~= 4)
error('Input: Invalid DH matrix. It must have 4 rows.')
end
obj.theta = A(1,:);
obj.d = A(2,:);
obj.a = A(3,:);
obj.alpha = A(4,:);
obj.type = types;
end
end
end
endCases:
types = double(repmat(DQ_JointType.REVOLUTE, 1,5));
dh_matrix = [theta; d; a; alpha, types];
robot = DQ_SerialManipulatorDH(dh_matrix, 'standard');
types = double(repmat(DQ_JointType.REVOLUTE, 1,5));
dh_matrix = [theta; d; a; alpha, types];
robot = DQ_SerialManipulatorDH(dh_matrix);
dh_matrix = [theta; d; a; alpha];
types = [1 ... 1];
robot = DQ_SerialManipulatorDH(dh_matrix, types);
dh_matrix = [theta; d; a; alpha];
types = repmat(DQ_JointType.REVOLUTE, 1,5); % No casting to double
robot = DQ_SerialManipulatorDH(dh_matrix, types); I think this could be easily implemented in C++/Python. For instance, we could have something like DQ_SerialManipulatorDH(const MatrixXd& dh_matrix, const std::vector<DQ_JointTypes>& types);This proposal make sense or could be useful? what do you think? Best regards, Juancho |
Hi @mmmarinho, It's a sensible strategy. Let's proceed with it. Best wishes, |
Hi @juancho, Let's defer this because we need to focus on @mmmarinho's suggestion. Your solution works, but we need to see if it's necessary, given your motivations, because cells in MATLAB are just a mechanism to store data. Therefore, it suffices to use a container in C++, which is pretty standard, to provide the same functionality as cells. For example, see how to use lists. |
… of abstract ones.
|
No comment on the applicability of the code for now, but a little bit of advice in making it less verbose, if applicable. function obj = DQ_SerialManipulatorDH(A, types)
obj.n_links = size(A,2);
% Maybe explain what this switch aims to achieve and some information about which is legacy
switch nargin
case 0 % No empty constructor
error(['Input: matrix whose columns contain the DH parameters' ...
' and type of joints.'])
case 1 % One argument initialization is deprecated from 23.04
warning(['DQ_SerialManipulatorDH(A) is deprecated.' ...
' Please use DQ_SerialManipulatorDH(A, types) instead.']);
if(size(A,1) ~= 5)
error('Input: Invalid DH matrix. It must have 5 rows.')
end
obj.type = A(5,:);
case 2 % String convention is deprecated since (?)
if isa( types, 'char') % ex: types = 'standard'
warning(['DQ_SerialManipulatorDH(A, convention) is deprecated.' ...
' Please use DQ_SerialManipulatorDH(A, types) instead. Example: ' str_new]);
if(size(A,1) ~= 5)
error('Input: Invalid DH matrix. It must have 5 rows.')
end
obj.type = A(5,:);
elseif strcmp(class(types), 'DQ_JointType')
if(size(A,1) ~= 4)
error('Input: Invalid DH matrix. It must have 4 rows.')
end
obj.type = types;
elseif isa(types, 'double')
warning(['TODO warning. Use DQ_JoinType instead.'])
if(size(A,1) ~= 4)
error('Input: Invalid DH matrix. It must have 4 rows.')
end
obj.type = types;
end
end
obj.theta = A(1,:);
obj.d = A(2,:);
obj.a = A(3,:);
obj.alpha = A(4,:);
end
end |
…pose_jacobian, and raw_pose_jacobian_derivative
…sign proposed by Murilo.
|
Hi @bvadorno, thank you for your feedback. I implemented the new design proposed by @mmmarinho. |
Hi @mmmarinho, thank you for your feedback. Your suggestion is really welcome. The code is less verbose! |
|
@bvadorno I realized that I forgot to update the header of DQ_SerialManipulator, specifically the part describing raw_fkm, raw_pose_jacobian, and raw_pose_jacobian_derivative as abstract methods. |
Hi @juanjqo, Yes, you can. I won't be able to work on this review in the next few hours. Best wishes, |
@bvadorno thanks. I implemented the modifications. The PR is ready to your review. |
[DQ_Kinematics.m] Added the dim_configuration_space protected property. [DQ_SerialManipulatorDH] Added the properties theta,a, d, alpha and updated the constructor of the class. [DQ_SerialManipulatorDH.m] Updated the documentation. [DQ_SerialManipulator.m] Defined the class as an abstract class and updated the constructor. [DQ_SerialManipulator.m] Defined abstract methods. Removed raw_fkm. [DQ_SerialManipulatorDH.m] Removed fkm, which is now in DQ_SerialManipulator. [DQ_SerialManipulator.m] Removed raw_pose_jacobian_derivative. [DQ_SerialManipulator.m] Removed raw_pose_jacobian_derivative. [DQ_SerialManipulatorDH.m] Added the pose_jacobian_derivative. [DQ_Kinematics.m] Removed changes in DQ_Kinematics [DQ_SerialManipulator.m] Removed dim_configuration_space to keep using the n_links property. [DQ_SerialManipulatorDH.m] Removed dim_configuration_space to keep using the n_links property. [ComauSmartSixRobot.m] Updated the robot definition. [DQ_SerialManipulator.m] Defined the raw_pose_jacobian_derivative as an abstract method and defined its concrete version. [DQ_SerialManipulatorDH.m] Modified the name of the method to raw_pose_jacobian_derivative. [DQ_SerialManipulatorMDH.m] Added a concrete class to model robots using the modified DH convention. [CONTRIBUTING.md] Updated the file. Updated the file with last Bruno's recommendations. [DQ_Kinematics.h] Fixed missing semi-colon. [DQ_SerialManipulator.m] the Fixed error message of the constructor. [DQ_SerialManipulator.m] Added comments in some lines. [DQ_SerialManipulatorDH.m] Protected the methods get_w and dh2dq, as in C++. [DQ_SerialManipulatorDH.m] Added minimal changes in the dh2dq method. [DQ_SerialManipulator.m] Removed the convention property and some comments. [DQ_SerialManipulator.m] Updated the year of the copyright [DQ_SerialManipulatorDH.m] Updated the copyright. [DQ_SerialManipulatorMDH] Removed the class. I will add it in a future PR. [DQ_SerialManipulator.m] Updated the documentation. Update CONTRIBUTING.md - Fixed grammar problems across the file. - Added more information about longer commits. [CONTRIBUTING.md] Fixed typos pointed out by Bruno in the contributing diagram [CONTRIBUTING.md] Fixed typos pointed out by Bruno in the contributing diagram [DQ_Kinematics.m] Updated the copyright and the Bruno's email. [DQ_SerialManipulator.m] Removed TODO comments and updated the Bruno's email. [DQ_SerialManipulator.m] Fixed comment according to Bruno's suggestion [DQ_SerialManipulator.m] Fixed comment according to Bruno's suggestion. [DQ_SerialManipulatorDH.m] Fixed error message according to Bruno's suggestion. [DQ_SerialManipulatorDH.m] Added modifications according to Bruno's suggestion [DQ_SerialManipulator.m] Added the dh2dq as an abstract method. [DQ_SerialManipulatorDH.m] Updated the documentation of dh2dq [JointType.m] Created a enumeration class containing type of joints. [DQ_JointType] Implemented the Bruno's suggestions. [DQ_JointType.m] Updated the contributors section according to Murilo's suggestion [DQ_SerialManipulatorDH.m] Updated the header as discussed in #75 [DQ_SerialManipulator.m] Removed the argument of the constructor, as suggested by Bruno. [DQ_SerialManipulatorDH.m] Updated the constructor of the class taking into account the modifications in the superclass. [DQ_SerialManipulatorDH.m] Added the date of some commits. [DQ_SerialManipulatorDH.m] Modified the class to use DQ_JointType [ComauSmartSixRobot.m] Updated the class to use DQ_JointType [ComauSmartSixRobot.m] Updated the website, Bruno's email and the copyright. [ComauSmartSixRobot.m] Fixed the robot definition using the MDH class for serial manipulators. [DQ_SerialManiplator.m] Updated the comments of pose_jacobian and pose_jacobian_derivative according to Bruno's suggestion. [DQ_SerialManipulator.m] Updated the condition of pose_jacobian_derivative. If ith==n_links the effector is not taken into account anymore [DQ_SerialManipulator.m] Modified the if condition in pose_jacobian() Now, when ith==n_links the effector is not taken into account. Revert "[DQ_SerialManipulator.m] Modified the if condition in pose_jacobian()" This reverts commit 4ee9ebd. [DQ_SerialManipulator.m] Removed the abstract method dq2dh(). [CONTRIBUTING.md] Fixed type of font and the color of two words. [DQ_SerialManipulator.m] Removed some lines in the header as requested by Bruno [DQ_SerialManipulator.m] Updated the pose_jacobian_derivative method to match pose_jacobian, as discussed in #75 [DQ_SerialManipulatorDH.m] Fixed the number of the PR to which I contributed. [DQ_SerialManipulatorMDH.m] Added the class to model robots using the MDH parameters. [DQ_SerialManipulatorMDH.m] Updated the header. [DQ_SerialManipulatorMDH.m] Updated the header according to Bruno's suggestion. [DQ_SerialManipulatorMDH.m] Improved the design of the class as requested by Bruno. [DQ_SerialManipulator.m] Added get_w and get_link2dq as protected abstract methods. [DQ_SerialManipulator.m] The raw methods are concrete methods instead of abstract ones. [DQ_SerialManipulatorDH.m] Removed the concrete methods raw_fkm, raw_pose_jacobian, and raw_pose_jacobian_derivative [DQ_SerialManipulatorDH.m] Renamed the method dh2dq. [DQ_SerialManipulatorMDH.m] Updated the class according to the new design proposed by Murilo. [DQ_SerialManipulator.m] Updated the header. [DQ_SerialManipulatorDH.m] Updated the header. [DQ_SerialManipulatorMDH.m] Updated the header. [DQ_SerialManipulator.m] Modified the documentation of raw_fkm as suggested by Bruno. Author: juancho <juanjqogm@gmail.com> Date: Sat Dec 3 16:51:55 2022 +0900
@dqrobotics/developers
Hi @bvadorno,
this PR modifies the classes DQ_SerialManipulator and DQ_SerialManipulatorDH. The following changes are proposed:
DQ_SerialManipulatoris an abstract class now.raw_fkm(),raw_pose_jacobian()andraw_pose_jacobian_derivative()are defined as abstract methods inDQ_SerialManipulatorand they are defined as concrete ones inDQ_SerialManipulatorDH.fkm(),pose_jacobian()andpose_jacobian_derivative()are defined only inDQ_SerialManipulator.Update
Requirements:
DQ_SerialManipulatorMDH()and therefore it is required this modification in matlab-examples.UML diagram:
Blue background with bold text represents modifications or new things.
Final design (proposed by @mmmarinho)
Tasks:
The main goal is to update/sincronize the current version of dqrobotics-matlab with respecto to the C++ version. A lot of things are not sincronized between them yet, but this is the first step.
Best regards,
Juancho