This PR adds the property dim_configuration_space in the superclass DQ_Kinematics #94
Conversation
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
…s and removed it from the subclasses. [DQ_Kinematics] Added the protected property dim_configuration_space. [DQ_MobileBase] Removed the property dim_configuration_space. [DQ_SerialWholeBody] Removed the property dim_configuration_space. [DQ_WholeBody] Removed the property dim_configuration_space. [DQ_FreeFlyingRobot] Removed the property dim_configuration_space.
…or and all its subclasses [DQ_SerialManipulator] Removed n_links. Now the class uses dim_configuration_space from DQ_Kinematics. [DQ_SerialManipulatorDH, MDH] Removed the definition of n_links to comply the changes in DQ_SerialManipulator and DQ_Kinematics.
bvadorno
approved these changes
Apr 30, 2023
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
2 participants
Add this suggestion to a batch that can be applied as a single commit.
This suggestion is invalid because no changes were made to the code.
Suggestions cannot be applied while the pull request is closed.
Suggestions cannot be applied while viewing a subset of changes.
Only one suggestion per line can be applied in a batch.
Add this suggestion to a batch that can be applied as a single commit.
Applying suggestions on deleted lines is not supported.
You must change the existing code in this line in order to create a valid suggestion.
Outdated suggestions cannot be applied.
This suggestion has been applied or marked resolved.
Suggestions cannot be applied from pending reviews.
Suggestions cannot be applied on multi-line comments.
Suggestions cannot be applied while the pull request is queued to merge.
Suggestion cannot be applied right now. Please check back later.
@dqrobotics/developers
Hi @bvadorno and @mmmarinho ,
This PR adds the property
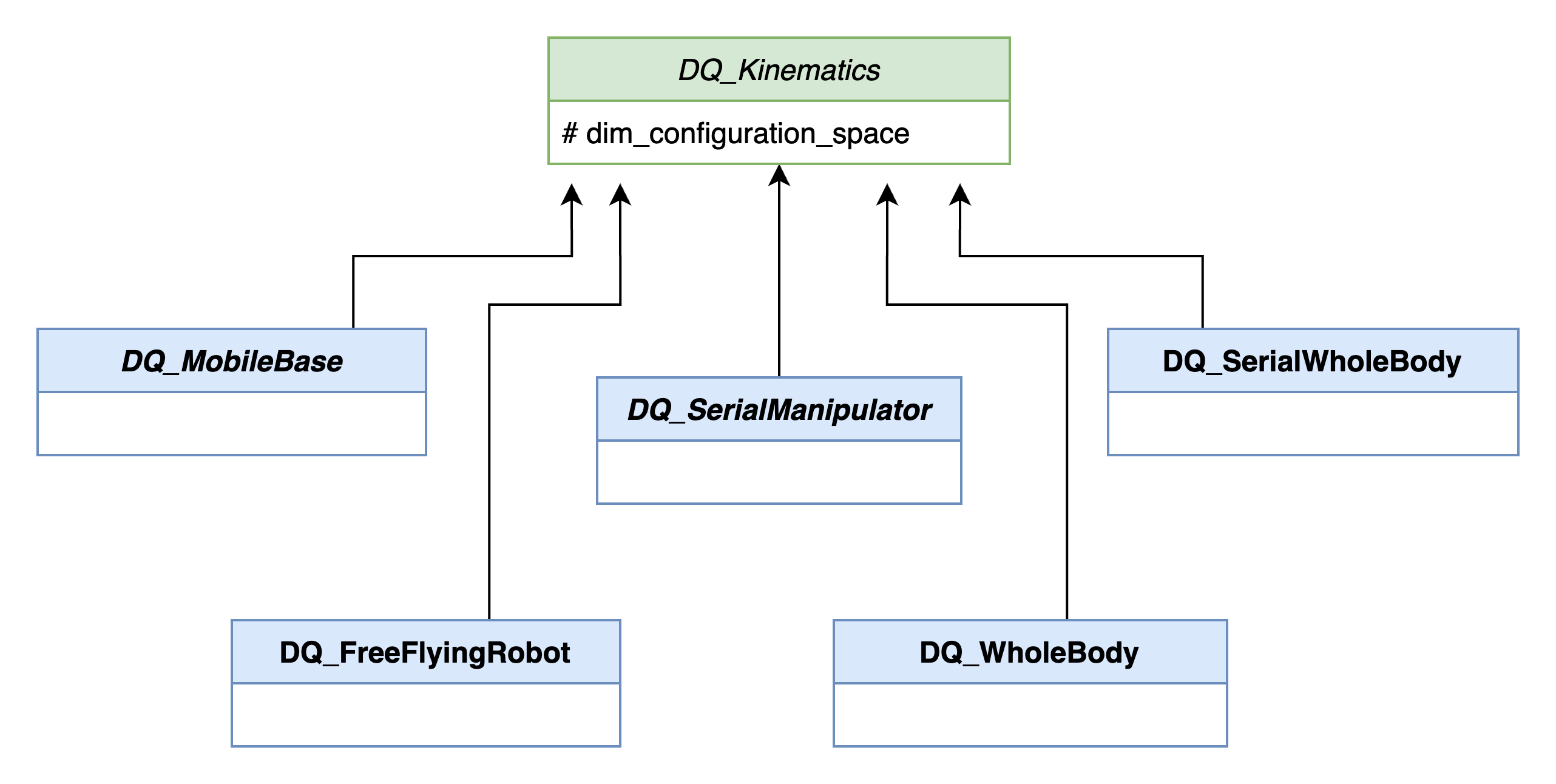
dim_configuration_spacein the superclassDQ_Kinematics. This modification is inspired by the current C++ implementation and aims to advance a step toward the convergence of both versions of DQ Robotics.Motivation:
All subclasses of the superclass
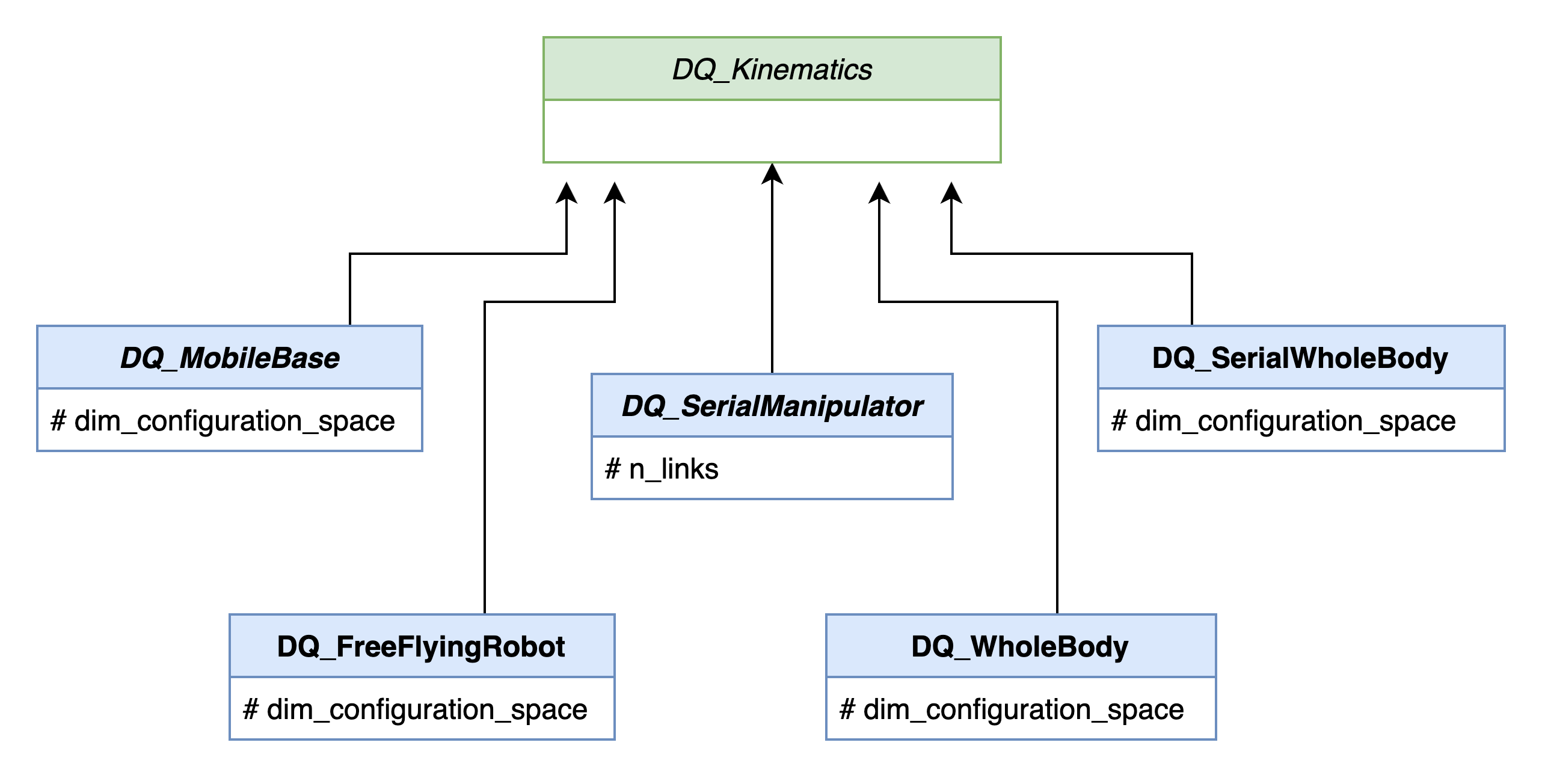
DQ_Kinematicsimplement the propertydim_configuration_space. Since the configuration space size is a common property of all subclasses, it looks reasonable to implement it in the superclass directly.List of modifications:
dim_configuration_spaceinDQ_Kinematics.dim_configuration_spacefrom the following classes:DQ_MobileBaseDQ_SerialWholeBodyDQ_FreeFlyingRobotDQ_WholeBodyn_linksfromDQ_SerialManipulator. Consequently, I modified internal implementations of the class and its subclasses to comply this change. For example, inDQ_Serialmanipulatorthe parts using n_links were updated.This is,
Current Master Branch:
Current PR:
The only modification required in the subclasses of
DQ_SerialManipulatorwas the following:Current master branch:
This PR:
I tried to avoid those internal modifications as much as possible, as suggested/pointed out by Bruno and Murilo. Nevertheless, I think it would be weird to have
n_linksonly in one of the subclasses ofDQ_Kinematicsacting as a localdim_configuration_space.Current Master Branch:
Proposal in this PR:
Please let me know what do you think.
Best regards,
Juancho