![]()
Industrial-Grade PLC Runtime in Go
IEC 61131-3 Structured Text | 20+ Protocol Drivers | Web IDE | 280,000+ Lines of Code
Features • Web IDE • Node-RED • Debugger • AI • Agentic • Manifests • Protocols • Clustering • Redundancy • Auth • Licensing • Snap • Download • Quick Start • Architecture • Whitepapers
GOPLC is a full-featured PLC runtime written entirely in Go. It executes IEC 61131-3 Structured Text programs with industrial-grade features:
- Multi-task scheduler with priorities, watchdogs, and microsecond-precision scan times
- 20+ protocol drivers including Modbus, EtherNet/IP, DNP3, BACnet, OPC UA, FINS, S7, IEC 104, Sparkplug B, KNX, M-Bus, SNMP, and ctrlX EtherCAT
- ctrlX CORE EtherCAT I/O — native Data Layer IPC via Bosch SDK: 500 Hz polling, 0.69ms scan, 10x faster than REST
- Built-in Web IDE with Monaco editor, statement-level debugger, and project management
- Integrated Node-RED with 7 custom PLC nodes for building HMI dashboards
- AI Assistant supporting Claude, OpenAI, and Ollama for code generation
- 1,900+ built-in functions covering math, strings, crypto, HTTP, databases, motion control, and more
- Real-time capable with memory locking, CPU affinity, and GC tuning
- Boss/Minion clustering scaling to 10,000+ PLC instances

| Feature | Description |
|---|---|
| ST Parser | Full IEC 61131-3 Structured Text with extensions |
| Multi-task Scheduler | Cooperative scheduling with priorities (1-255) |
| Scan Times | From 100μs to hours, configurable per task |
| Watchdog Protection | Per-task watchdogs with fault/halt options |
| Hot Reload | Update individual tasks without stopping the runtime |
| Function Blocks | TON, TOF, TP, RTO, CTU, CTD, CTUD, R_TRIG, F_TRIG, SR, RS, SEMA |
| RETAIN Variables | Persistent variables across warm/cold restarts |
| Project Files | Single .goplc file contains programs, tasks, configs, HMI pages |
| Category | Count | Highlights |
|---|---|---|
| Conversion | 157 | INT_TO_REAL, DWORD_TO_TIME, HEX_TO_INT |
| Data Structures | 130 | LIST_, MAP_, QUEUE_, STACK_, SET_, HEAP_, DEQUE_* |
| Crypto & Encoding | 55 | AES_, SHA, RSA_, JWT_, HMAC_, BASE64_, GZIP_* |
| MQTT & Sparkplug B | 56 | MQTT_PUBLISH, MQTT_SUBSCRIBE, SPARKPLUG_NODE_, SPARKPLUG_METRIC_ |
| SNMP | 47 | SNMP_GET, SNMP_WALK, SNMP_AGENT_, SNMP_TRAP_ (v1/v2c/v3) |
| Resilience | 40 | CIRCUIT_BREAKER_, RATE_LIMIT_, RETRY_, CACHE_, BULKHEAD_* |
| Array (Functional) | 50 | ARRAY_SORT, ARRAY_FILTER, ARRAY_MAP, ARRAY_REDUCE, ARRAY_ZIP_WITH |
| Debug | 35 | DEBUG_TO_FILE, DEBUG_TO_SQLITE, DEBUG_TO_INFLUX, DEBUG_TO_SYSLOG |
| String & Regex | 43 | CONCAT, SPLIT, REGEX_, FORMAT, JSON_ |
| JSON | 25 | JSON_PARSE, JSON_GET, JSON_SET, JSON_MERGE, JSON_PATH |
| Motion Control | 23 | MC_POWER, MC_MOVE_ABSOLUTE, MC_HOME, MC_JOG, GSV/SSV |
| HTTP & URL | 22 | HTTP_GET, HTTP_POST, URL_ENCODE, URL_PARSE, QUERY_STRING_* |
| Serial I/O | 20 | SER_OPEN, SER_READ, SER_WRITE, SERIAL_PORTS, SERIAL_FIND |
| Database | 21 | DB_CONNECT, DB_QUERY, DB_EXEC, DB_COMMIT, DB_LIST_TABLES |
| DateTime | 23 | NOW, DATE_, TIME_, ADD_TIME, DAY_OF_WEEK, TICK_MS |
| InfluxDB | 16 | INFLUX_CONNECT, INFLUX_WRITE, INFLUX_BATCH_ADD, INFLUX_BATCH_FLUSH |
| NMEA & GPS | 26 | NMEA_PARSE, NMEA_GET_LAT, GPS_DISTANCE, GPS_BEARING, GPS_IN_RADIUS |
| File & Config | 35 | FILE_READ, FILE_WRITE, CSV_PARSE, INI_READ, ZPL_BARCODE_128 |
| Specialty Protocols | 76 | KNX_SEND, MBUS_PARSE, ARTNET_SEND, SACN_SEND, MIDI_NOTE_ON, OSC_SEND, AT_CMD |
| Math & Statistics | 40 | SIN, COS, SQRT, POW, MEDIAN, STDDEV, CORRELATION, PERCENTILE |
| Barcode & Scale | 17 | BARCODE_PARSE, BARCODE_GS1_GET, SCALE_PARSE, SCALE_GET_WEIGHT |
| + OSCAT Library | 557 | Complete OSCAT Basic library (384 functions + 173 FBs) |
realtime:
enabled: true
mode: container # container | host | off
lock_os_thread: true # Pin goroutines to OS threads
cpu_affinity: [2, 3] # Pin to specific CPU cores
memory_lock: true # mlockall() to prevent page faults
gc_percent: 500 # Reduce GC frequency
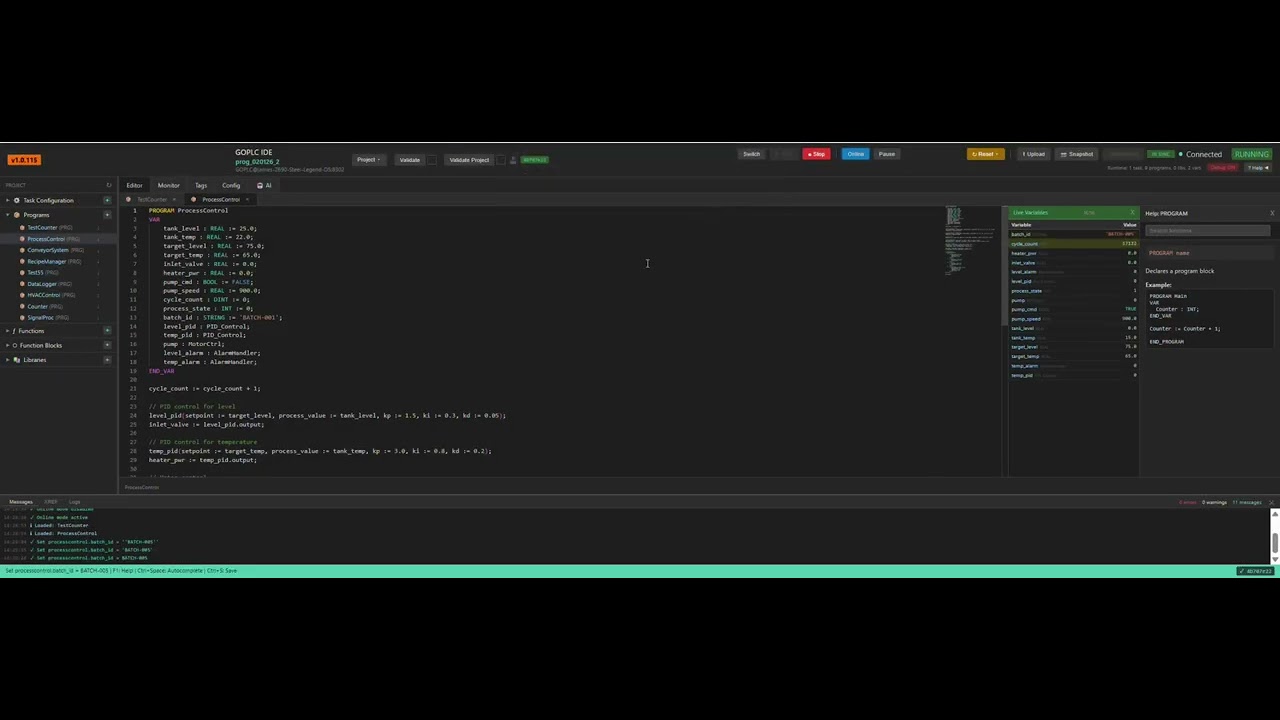
rt_priority: 50 # SCHED_FIFO priority (requires privileges)GOPLC includes a full-featured browser-based IDE built on 18 modular JavaScript components:

- Monaco Editor with full IEC 61131-3 syntax highlighting
- Project Tree showing tasks, programs, functions, libraries
- Live Variable Watch with real-time updates via WebSocket
- Runtime Control - Start/Stop/Reset/Upload/Download
- Project Management - New/Open/Save/Export/Import (
.goplcformat) - Task Configuration - Priorities, scan times, watchdogs
- Per-Task Hot Reload - Update one task without stopping others
- Multi-Runtime Switch - Connect to different PLC instances
- Hash-Based Sync Indicator - Shows if IDE matches runtime code
- Config Editor - YAML configuration with syntax highlighting
- Cross-Reference Search - Find variable/function usage across all programs
- Tags Browser - Browse all tags with sorting and filtering
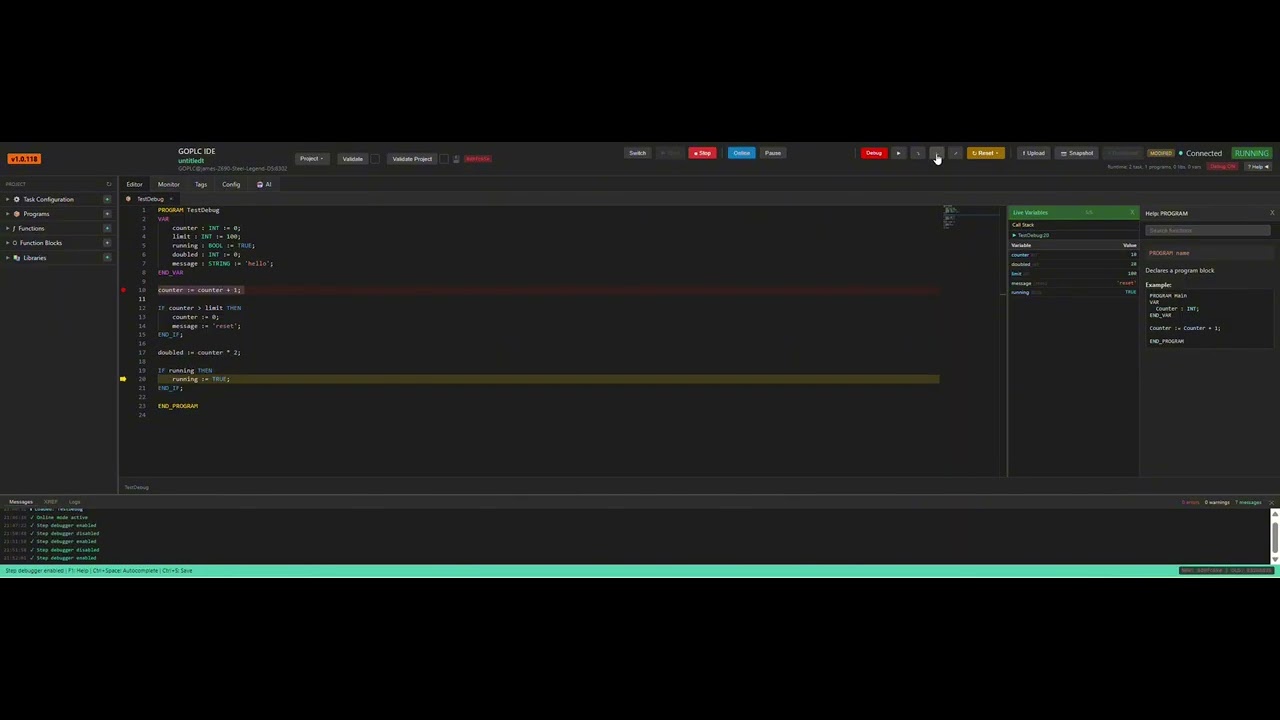
CoDeSys-style live variable debugging — monitor and modify PLC variables in real-time while the program executes:
- Split-Panel Layout - Variable list panel alongside the editor with no layout shift
- Click-to-Edit Values - Click any variable value to write a new value to the running PLC
- 250ms Live Updates - Continuous polling with change highlighting
- Boolean Coloring - TRUE values in green, FALSE in red
- Type-Based Formatting - Specialized display for BOOL, INT, REAL, TIME, STRING
- FB Instance Support - View function block member variables
- Pause/Step/Resume - Per-scan stepping for system-level debugging
Click to watch: Online Live View Demo
 Monitor - Variables Live task/variable view with Watch List |
 Watch List Real-time variable monitoring |
 Config Editor YAML configuration with syntax highlighting |
 Cross Reference Search across all programs |
 DataLayer Sync Multi-PLC variable synchronization |
 ESP32 HMI Hardware status display |
Full statement-level step debugger comparable to CoDeSys and commercial PLC IDEs. Zero runtime overhead when disabled — a single atomic boolean check on the fast path.
| Action | Shortcut | Description |
|---|---|---|
| Continue | F5 | Resume execution until the next breakpoint |
| Step Over | F10 | Execute the current line, skip over function/FB calls |
| Step Into | F11 | Step into function and function block calls |
| Step Out | Shift+F11 | Run until the current function/FB returns |
- Line Breakpoints - Click the editor gutter to set/clear breakpoints on any ST line
- Breakpoint Enable/Disable - Toggle breakpoints without removing them
- Call Stack - View the full function block / function call chain at each stop
- Variable Inspection - Examine all variables and their current values at each step
- Multi-Task Broadcast - When any task hits a breakpoint, ALL tasks pause for a consistent system snapshot
- Watchdog Auto-Suspend - Watchdog timers automatically suspend while stopped in the debugger
- Hit Counter - Track how many times each breakpoint has been triggered
# Enable the debugger
curl -X POST http://localhost:8082/api/debug/step/enable
# Set a breakpoint at line 15 of MainProgram
curl -X POST http://localhost:8082/api/debug/step/breakpoints \
-d '{"program": "MainProgram", "line": 15}'
# Continue execution
curl -X POST http://localhost:8082/api/debug/step/continue
# Step into the next statement
curl -X POST http://localhost:8082/api/debug/step/into
# Step over the current statement
curl -X POST http://localhost:8082/api/debug/step/over
# Step out of the current function/FB
curl -X POST http://localhost:8082/api/debug/step/out
# Get current debug state (position, stopped status, call stack)
curl http://localhost:8082/api/debug/step/state
Click to watch: Debugger Walkthrough
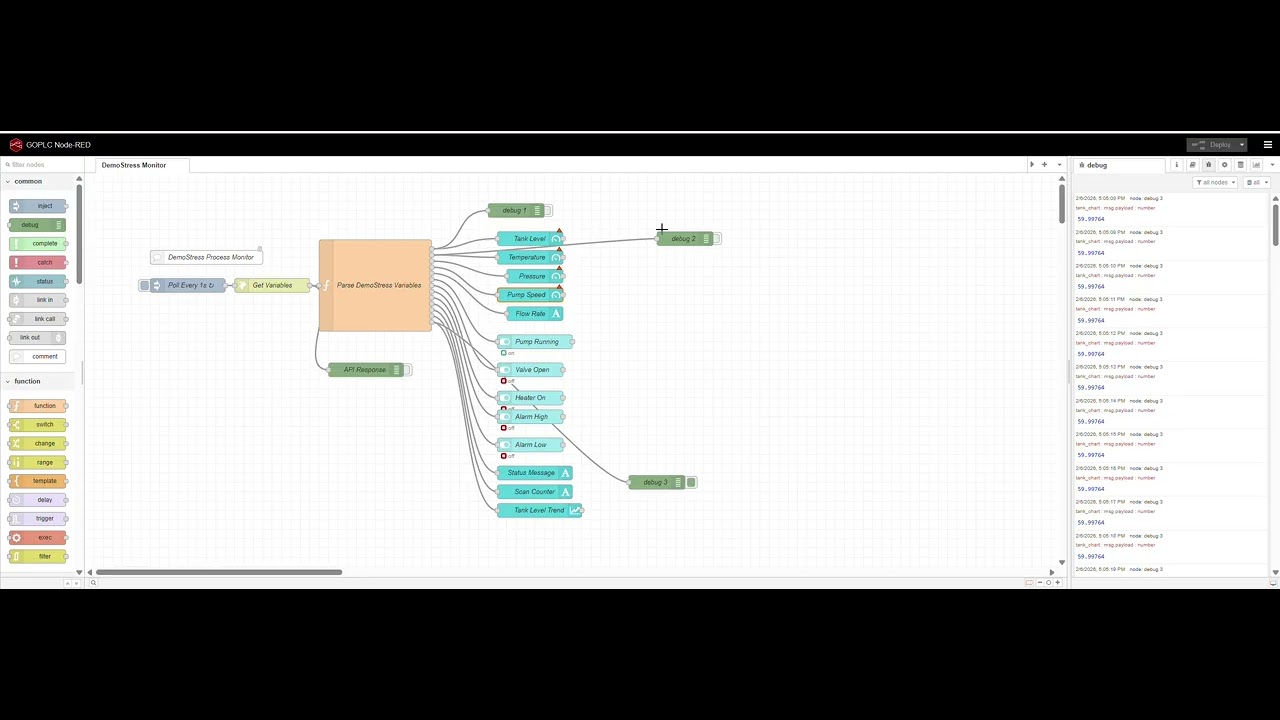
GOPLC manages Node-RED as an integrated subprocess with full lifecycle management, a reverse proxy, and 7 custom PLC nodes for building industrial HMI dashboards — all accessible through the same port as the Web IDE.
GOPLC (port 8082)
├── /ide/ → Web IDE
├── /nodered/ → Node-RED editor (reverse proxied)
├── /hmi/ → Built-in HMI pages
└── /api/ → REST API
- Node-RED auto-starts with GOPLC and auto-restarts on crash (exponential backoff)
- No separate port needed — reverse proxy serves Node-RED through GOPLC's API port
- GOPLC host/port injected into Node-RED's global context for zero-config node connections
| Node | Description |
|---|---|
| goplc-connection | Config node — auto-detects host/port from global context |
| goplc-read | Read a single variable or all variables from the PLC |
| goplc-write | Write values to PLC variables |
| goplc-subscribe | Real-time WebSocket variable updates with on-change filtering |
| goplc-runtime | Start/stop/status control of the PLC runtime |
| goplc-task | Task management — reload, status, per-task control |
| goplc-cluster | Read/write variables on cluster minions via boss proxy |
Auto-installs @flowfuse/node-red-dashboard (Dashboard 2.0) for building operator HMI screens. Includes demo flows:
- Industrial HMI Demo - Water treatment plant dashboard with live gauges, trends, and alarm panels
- Dual Runtime - Multi-PLC communication and monitoring
- Quick Start Dashboard - Simple template to get started
The AI assistant can generate complete Node-RED flows from natural language descriptions. Generated flows include custom PLC nodes pre-configured for the current runtime. Import directly from the AI chat with one click.
Click to watch: Node-RED Integration Walkthrough
nodered:
enabled: true
port: 1880 # Node-RED internal port
auto_start: true
restart_on_crash: true
max_restarts: 5
restart_backoff_ms: 2000
user_dir: "data/nodered"
flow_file: "flows.json"
credential_secret: "" # Optional encryption key
extra_modules: # Auto-install on startup
- "@flowfuse/node-red-dashboard"# Check Node-RED status (uptime, PID, restart count)
curl http://localhost:8082/api/nodered/status
# Start/stop/restart Node-RED subprocess
curl -X POST http://localhost:8082/api/nodered/start
curl -X POST http://localhost:8082/api/nodered/stop
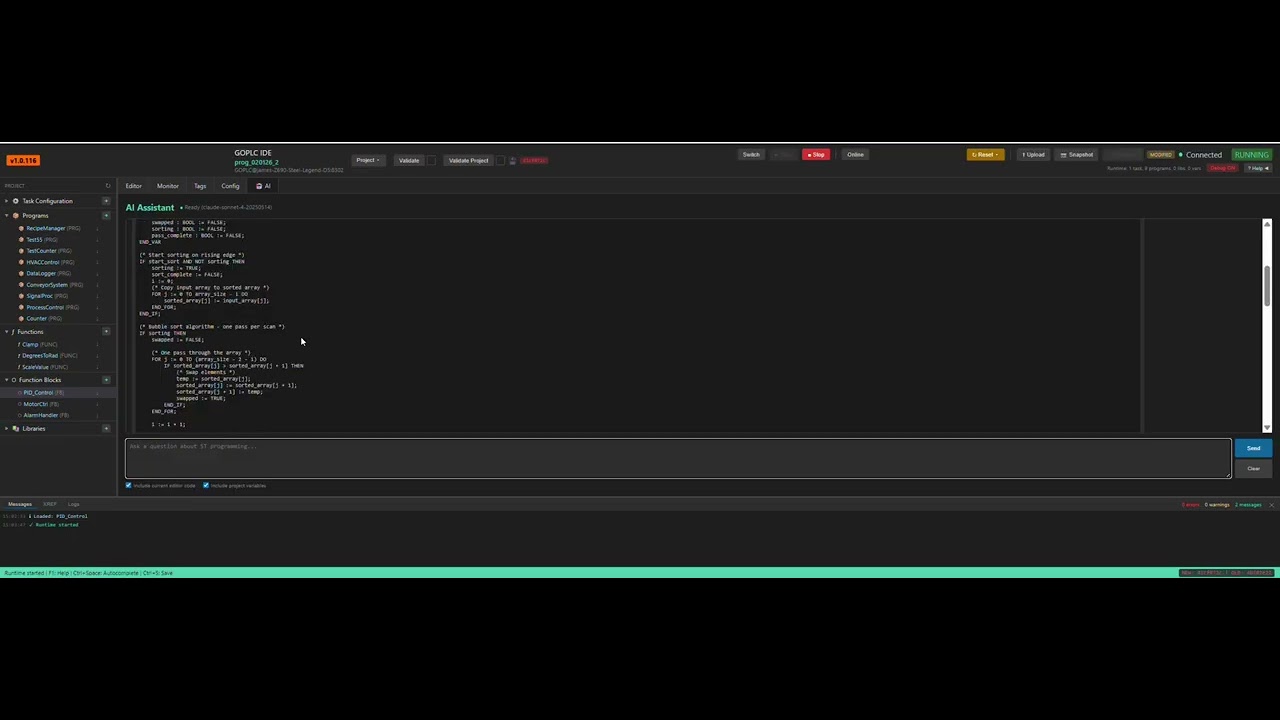
curl -X POST http://localhost:8082/api/nodered/restartBuilt-in AI coding assistant that understands all 1,900+ ST functions and can generate Structured Text code, HMI pages, and Node-RED flows from natural language descriptions.
| Provider | Models | Use Case |
|---|---|---|
| Claude (Anthropic) | claude-sonnet-4-20250514 (default) | Best ST code quality |
| OpenAI | GPT-4o, GPT-4, etc. | Alternative cloud provider |
| Ollama | qwen2.5-coder, deepseek-r1, etc. | Fully local/offline |
- Structured Text Programs - PID loops, state machines, alarm handlers, protocol integrations. Detected as
ieccode blocks with an "Insert as Program" button. - HMI Pages - Custom web dashboards with live PLC data. Detected as HTML with "Preview" and "Save as HMI Page" buttons.
- Node-RED Flows - Complete flow JSON with custom PLC nodes. Detected automatically with an "Import to Node-RED" button.
The AI receives the full function registry (1,900+ signatures with return types), current runtime variables, active tasks, and loaded programs as context — so it generates code that works with your specific setup.
Click to watch: AI Code Writing Demo
ai:
enabled: true
provider: "claude" # claude | openai | ollama
api_key_env: "ANTHROPIC_API_KEY"
model: "claude-sonnet-4-20250514"
endpoint: "" # Required for Ollama (e.g., http://localhost:11434/v1)
max_tokens: 8192
temperature: 0.3An autonomous AI control agent that operates the PLC directly — separate from the code-writing assistant. Instead of generating code for a human to review, it reads sensors, writes setpoints, deploys programs, and manages tasks via tool calls in a multi-turn loop.
| Tool | Category | Description |
|---|---|---|
read_variable |
Read-only | Read current PLC variable value |
list_variables |
Read-only | List all variables with optional prefix filter |
get_task_status |
Read-only | All task states, scan times, faults |
get_diagnostics |
Read-only | Memory, uptime, scan stats |
get_faults |
Read-only | Active task fault messages |
write_variable |
Normal | Write setpoint or control variable |
reload_task |
Normal | Hot-reload task without stopping others |
start_task |
Normal | Start named task or all tasks |
create_manifest |
Normal | Register hardware descriptor |
create_hmi_page |
Normal | Generate Node-RED Dashboard 2.0 flow |
deploy_program |
Normal | AI-generate and deploy a control program |
stop_task |
Critical | Stop a running task |
curl -X POST http://localhost:8082/api/ai/control \
-H "Content-Type: application/json" \
-d '{
"message": "Ramp the temperature setpoint to 50 degrees and start the pump",
"max_turns": 6
}'The response includes actions_executed — a full log of every tool call and result — and turns_used showing how many AI iterations were needed. Multi-turn conversation history is supported for follow-up instructions.
Declarative YAML descriptors for physical hardware. GOPLC reads manifests and auto-generates a SysInit_{id} ST program that opens hardware channels on startup and maps sensor readings to named PLC variables.
id: "greenhouse_1"
name: "Tomato Greenhouse"
hardware:
- id: "temp_sensor"
type: "phidgets"
channel_type: "temperature"
serial: -1 # -1 = any connected device
hub_port: 0
st_var: "temp_c"
- id: "heater_relay"
type: "phidgets"
channel_type: "digital_output"
hub_port: 2
st_var: "heater_on"
- id: "custom_sensor"
type: "custom"
open_call: "MY_DEVICE_OPEN('{name}')"
read_call: "MY_DEVICE_READ('{name}')"
write_call: "MY_DEVICE_WRITE('{name}', {var})"GOPLC generates VAR_GLOBAL declarations for all st_var bindings and a startup sequence that initializes each hardware channel. Manifests can be created manually, via API, or through the agentic control loop.
API:
GET /api/system/manifests # List all manifests
POST /api/system/manifests # Create manifest
PUT /api/system/manifests/:id # Update manifest
DELETE /api/system/manifests/:id # Delete manifestCreate and serve custom web-based operator displays directly from the IDE.
GOPLC ships with a default HMI dashboard at /hmi/default-dashboard showing:
- Runtime state, uptime, scan count, and memory usage
- Live trend charts for task scan times
- System information and feature summary
- Create custom HTML pages via the AI assistant or manually
- Pages stored inside the
.goplcproject file (portable, single-file deployment) - Helper library (
goplc-hmi.js) provides variable read/write from HMI pages - Served at
/hmi/:page-namewith no additional configuration
# List all HMI pages
curl http://localhost:8082/api/hmi/pages
# Create a new page
curl -X POST http://localhost:8082/api/hmi/pages \
-d '{"name": "tank-overview", "content": "<html>...</html>"}'
# Get/update/delete pages
curl http://localhost:8082/api/hmi/pages/tank-overview
curl -X PUT http://localhost:8082/api/hmi/pages/tank-overview -d '{"content": "..."}'
curl -X DELETE http://localhost:8082/api/hmi/pages/tank-overviewSearchable topic browser with static forms and AI-assisted setup that generates ready-to-apply YAML configuration. Lowers the barrier for configuring protocols, clustering, and services.
| Topic | Mode | Description |
|---|---|---|
| AI Setup | Form | Configure AI provider, API key, model |
| Modbus Server | Form | TCP server with register mapping |
| Modbus Client | Form | TCP client with polling intervals |
| OPC UA Server | Form | Server configuration |
| FINS | Form | Omron FINS protocol setup |
| EtherNet/IP | Form | Adapter and scanner configuration |
| DNP3 | Form | Master/outstation setup |
| S7comm | Form | Siemens S7 configuration |
| Cluster Boss | Form | Boss with member list (add/remove rows) |
| Cluster Minion | Form | Minion with unix socket |
| I/O Mapping | Form | Map ST variables to protocol addresses |
| Modbus Bridge | AI | Custom gateway configurations |
| Performance | AI | Tuning and optimization guidance |
| Real-time | AI | RT container mode setup |
| DataLayer | AI | Multi-PLC sync configuration |
Each form generates a YAML snippet that can be applied via hot-reload — no restart needed.
GOPLC includes 60,000+ lines of protocol code for seamless integration with existing automation systems.
| Protocol | Role | Transport | Lines | Target Systems |
|---|---|---|---|---|
| Modbus TCP/RTU | Server + Client | TCP, UDP, Serial | 7,241 | Universal - PLCs, VFDs, meters, sensors |
| DNP3 | Master + Outstation | TCP, UDP, Serial | 13,354 | SCADA - Electric, water, gas utilities |
| BACnet/IP & MSTP | Server + Client | UDP, RS-485 | 7,883 | Building automation - HVAC, fire, access |
| EtherNet/IP | Adapter + Scanner | TCP, UDP | 5,388 | Allen-Bradley - CompactLogix, ControlLogix |
| OPC UA | Server + Client | TCP | 4,496 | Modern - Cloud integration, MES, SCADA |
| FINS | Server + Client | TCP, UDP | 3,565 | Omron - NX, NY, CP, CJ series PLCs |
| S7comm | Server + Client | TCP (TPKT/COTP) | 2,441 | Siemens - S7-300, S7-400, S7-1200, S7-1500 |
| IEC 60870-5-104 | Client + Server | TCP | 2,100 | Utilities - Power grid SCADA, substation automation |
| Sparkplug B | Node + Host | MQTT + Protobuf | 1,800 | IIoT - Unified Namespace, SCADA/MES integration |
| PROFINET | Server + Client | TCP, UDP | 1,997 | Siemens - Real-time industrial Ethernet |
| SEL | Server + Client | Serial | 1,758 | Protective relays - Power system monitoring |
| SNMP v1/v2c/v3 | Client + Agent + Trap | UDP | 3,597 | Network devices - Switches, UPS, sensors |
| DF1 | Client | Serial | 1,417 | Allen-Bradley legacy - SLC 500, MicroLogix, PLC-5 |
| KNX | Client | UDP/Multicast | 600 | Building automation - Lighting, blinds, HVAC |
| M-Bus | Master | TCP, Serial | 700 | Utility metering - Water, gas, heat, electric |
| ctrlX EtherCAT | DI + DO | REST or Native IPC | 1,200 | Bosch ctrlX CORE - EtherCAT I/O modules |
| Phidgets | Sensors + Actuators | USB/VINT | 800 | Phidgets USB/VINT sensor and actuator modules |
| Protocol | Functions | Transport | Use Case |
|---|---|---|---|
| Art-Net / DMX512 | 7 | UDP | Stage lighting, architectural lighting control |
| sACN / E1.31 | 7 | UDP Multicast | Entertainment lighting with priority control |
| MIDI | 16 | Serial/USB | Music production, audio equipment control |
| OSC | 12 | UDP | Audio/visual software, show control |
| AT Commands | 13 | Serial | Cellular modems, GSM/GPS modules |
| NMEA 0183 | 17 | Serial | GPS receivers, marine electronics |
Modbus TCP/RTU - Click to expand
- Full function code support (FC01-06, FC15-16)
- Coils, discrete inputs, holding registers, input registers
- RTU framing with CRC-16
- RS-485 half-duplex with RTS control
- Connection pooling and retry logic
- Diagnostics counters (FC08)
- Gateway mode (TCP to RTU bridge)
DNP3 - Click to expand
- Complete Master and Outstation implementation
- Binary/Analog inputs and outputs
- Counters with freeze support
- Event buffering with classes (1, 2, 3)
- Unsolicited responses
- Select-Before-Operate (SBO) control
- Time synchronization
- Serial transport (RS-232/RS-485)
- Data link layer with FCB/FCV
- Store-and-forward with SQLite buffering, GZIP compression, AES-256-GCM encryption
BACnet/IP & MSTP - Click to expand
- BACnet/IP over UDP (port 47808)
- BACnet/MSTP over RS-485 (token passing)
- All standard object types (AI, AO, AV, BI, BO, BV, MI, MO, MV)
- COV (Change of Value) subscriptions
- ReadPropertyMultiple for efficient polling
- Priority arrays (1-16) for commandable objects
- Schedule and Calendar objects
- TrendLog objects
- Alarm and Event services
- Segmentation for large responses
- Device discovery (Who-Is/I-Am)
EtherNet/IP - Click to expand
- CIP (Common Industrial Protocol) messaging
- Adapter mode (expose tags to scanners)
- Scanner mode (read/write remote tags)
- Explicit messaging (TCP port 44818)
- Implicit I/O (UDP port 2222)
- ForwardOpen/ForwardClose connections
- Unconnected messaging (UCMM)
- Assembly objects for I/O data
OPC UA - Click to expand
- Server and Client implementation
- Secure channel management
- Session authentication
- Node browsing
- Read/Write attributes
- Subscriptions with monitored items
- Method calls
- Security policies (None, Basic256Sha256)
SNMP v1/v2c/v3 - Click to expand
- SNMP v1, v2c, and v3 support
- GET, SET, GETNEXT, GETBULK operations
- WALK for MIB traversal
- Trap receiver
- SNMPv3 authentication (MD5, SHA)
- SNMPv3 privacy (DES, AES)
- ASN.1 BER encoding
Sparkplug B v3.0 - Click to expand
- Eclipse Sparkplug B specification v3.0 over MQTT
- Node lifecycle: NBIRTH, NDEATH, NDATA, NCMD
- Protobuf-encoded payloads with sequence numbering
- Metric types: boolean, integer, float, string with timestamps
- Command subscription for remote control (NCMD)
- Birth certificate on connect, death certificate via MQTT will
- Multi-metric batch publishing per NDATA message
- 26 ST functions for full node lifecycle management
IEC 60870-5-104 - Click to expand
- Full Client and Server implementation
- APCI frame handling (I, S, U formats)
- ASDU types: single/double-point, measured values, step position, normalized/scaled/short floating point
- Interrogation commands (station and group)
- Command types: single, double, regulating step, set-point
- Time-tagged variants for all information types
- 26 ST functions for IEC 104 operations
- Connection state machine with T1/T2/T3 timers
ctrlX EtherCAT I/O - Click to expand
- Two transport modes switchable from ST code — no recompilation needed
- REST mode (
'rest'): HTTP/TLS to ctrlX Data Layer REST API. Works everywhere, 100ms default poll - Native IPC mode (
'dl'): Direct function calls via official Boschctrlx-datalayer-golang/v2SDK (CGo). 2ms poll, 500 Hz I/O, sub-millisecond latency - 10 ST functions:
CTRLX_EC_CREATE,START,STOP,CONNECTED,READ_DI,WRITE_DO,READ_DO,STATS,BROWSE,DELETE CTRLX_EC_WRITE_DOreturns FALSE when disconnected — ST-level connection loss detection- Verified on Bosch ctrlX CORE X3 (ARM64 Cortex-A53) with physical loopback DO→DI
- Snap bundles
libcomm_datalayer.so+libsystemd.sofor native IPC at runtime
Performance (measured on X3 hardware):
| Metric | REST Mode | Native IPC Mode |
|---|---|---|
| Poll interval | 100ms | 2ms |
| Avg scan | 1.2ms | 0.69ms |
| I/O update rate | 10 Hz | 500 Hz |
| Determinism | Variable (HTTP stack) | Consistent (IPC) |
| Module | Purpose | Transport | Features |
|---|---|---|---|
| DataLayer | Multi-PLC sync | TCP, Shared Memory | Real-time variable sharing, <1ms latency, prefix filtering |
| MQTT | IoT/Cloud | TCP, TLS | Publish variables, subscribe to commands, QoS 0/1/2 |
| HTTP/REST | Integration | TCP | 60+ API endpoints, WebSocket streaming, SSE watch |
| Store-and-Forward | Reliability | SQLite | Offline buffering, GZIP compression, AES-256 encryption |
| Serial | Legacy | RS-232/485 | Configurable baud, parity, RTS/CTS flow control |
Tested & Production Ready:
| Device | Interface | I/O Type | Use Case |
|---|---|---|---|
| Nextion HMI | Serial/UART | Touch Display | Local operator interface |
| USB Camera | rpicam-still | Vision | Barcode, QC inspection |
| ESP32 Remote I/O | Modbus TCP | WiFi I/O Module | Wireless sensors/actuators |
| Raspberry Pi GPIO | Direct | Digital I/O | Edge computing, local control |
| PCF8574 | I2C | 8-bit I/O Expander | Expand GPIO count |
| Grove ADC | I2C | Analog Input | Seeed Studio sensors |
| Phidgets | USB/VINT | Multi-sensor | Temperature, humidity, voltage, current, relays, motors, encoders (simulation mode; real hardware via CGO extension) |
| ctrlX EtherCAT I/O | REST or Native IPC | 16 DI + 16 DO | Bosch ctrlX CORE — 500 Hz native IPC, 0.69ms scan, verified on X3 hardware |
Hobbyist & Maker Integrations:
GOPLC bridges the gap between industrial automation and hobbyist/maker hardware. All devices use USB serial with automatic port discovery, heartbeat monitoring, and auto-recovery on disconnect/reconnect.
| Device | Interface | Functions | Capabilities |
|---|---|---|---|
| Parallax Propeller 2 | Serial/USB | 56 ST functions | 8-core MCU — GPIO, Smart Pins, UART, I2C, SPI, ADC/DAC, PWM, encoder, frequency counter, OLED SSD1306, servo |
| Teensy 4.x | Serial/USB | 40+ ST functions | ARM Cortex-M7 — GPIO, ADC, PWM pairs, encoder, frequency counter, CAN bus, I2C, SPI, UART, PID, NeoPixel, OLED, RTC, TRNG |
| RP2040 / Pico | Serial/USB | 25+ ST functions | Dual-core ARM — GPIO, ADC, PWM, I2C, SPI, UART, NeoPixel, OLED, servo, ultrasonic, temperature |
| Arduino R4 WiFi | Serial/USB | 20 ST functions | Digital/analog I/O, servo, I2C, WiFi, BLE, LED matrix, temperature, ultrasonic |
| Flipper Zero | Serial/USB | 35 ST functions | GPIO, buttons, IR TX/RX, Sub-GHz TX/RX, NFC, RFID — custom binary FAP driver |
Implemented - Testing Soon:
| Device | Interface | I/O Type | Use Case |
|---|---|---|---|
| Orange Pi GPIO | Direct | Digital I/O | Cost-effective edge nodes |
| ADXL345 | I2C | Accelerometer | Vibration monitoring |
| DHT11/22 | 1-Wire | Temp/Humidity | Environmental sensing |
| TFT Display | SPI | Graphics Display | Custom HMI screens |
Planned:
| Device | Interface | I/O Type | Use Case |
|---|---|---|---|
| MCP3008 | SPI | 8-ch 10-bit ADC | Analog sensor input |
| ADS1115 | I2C | 4-ch 16-bit ADC | Precision measurement |
| MAX31855 | SPI | Thermocouple | High-temp sensing |
| MCP23017 | I2C | 16-bit I/O Expander | More GPIO |
| W5500 | SPI | Ethernet | Wired network on MCU |
Built-in packet capture and analysis with support for all protocols:
# Start capture with filters
curl -X POST http://localhost:8082/api/analyzer/start \
-d '{"protocols": ["modbus-tcp", "dnp3", "bacnet"]}'
# View captured transactions
curl http://localhost:8082/api/analyzer/transactions?limit=100
# Export to Wireshark
curl http://localhost:8082/api/analyzer/export/pcap -o capture.pcap
# Decode raw packet
curl -X POST http://localhost:8082/api/analyzer/decode \
-d '{"protocol":"modbus-tcp","raw_hex":"00 01 00 00 00 06 01 03 00 00 00 0A"}'Supported decoders: Modbus TCP/RTU, DNP3, BACnet/IP, EtherNet/IP, OPC UA, S7, FINS, IEC 104, SEL
| Industry | Protocols |
|---|---|
| Manufacturing | Modbus, EtherNet/IP, PROFINET, S7, FINS, OPC UA, Sparkplug B |
| Building Automation | BACnet/IP, BACnet/MSTP, KNX, Modbus, SNMP, OPC UA |
| Utilities/SCADA | DNP3, IEC 104, Modbus, SEL, M-Bus, OPC UA |
| Oil & Gas | Modbus, DNP3, OPC UA, EtherNet/IP, Sparkplug B |
| Water/Wastewater | DNP3, Modbus, OPC UA, Sparkplug B |
| Power Generation | DNP3, IEC 104, Modbus, SEL, IEC 61850 (planned) |
| Food & Beverage | EtherNet/IP, Modbus, OPC UA, S7 |
| Pharmaceutical | OPC UA, Modbus, S7, EtherNet/IP |
| Data Centers | SNMP, Modbus, BACnet, Sparkplug B |
| Entertainment/AV | Art-Net, sACN, MIDI, OSC |
| Marine/Fleet | NMEA 0183, GPS, Modbus, MQTT |
GOPLC supports distributed PLC architecture using a Boss/Minion pattern that scales to 10,000+ instances on a single machine.
Boss PLC (coordinator, port 8082)
├── Unix Socket → Minion: CRAC controller
├── Unix Socket → Minion: Fire suppression
├── Unix Socket → Minion: Power distribution
└── TCP fallback → Minion: Remote site
- Boss aggregates and proxies API calls to all minions
- Minions are fully isolated PLC instances (own scheduler, protocols, data)
- Communication via Unix sockets (same host) or TCP (networked)
- All minion access goes through the Boss API — minions never exposed directly
- Nested proxy supports multi-tier topologies: Supervisor → Edge Boss → Minions
Deploy updates to individual tasks without stopping the runtime:
# Reload only the MQTTTask — MainTask keeps running
curl -X POST http://localhost:8082/api/tasks/MQTTTask/reload# Read variables from a specific minion
curl http://localhost:8082/api/cluster/crac/api/variables
# Write to a minion's variable
curl -X PUT http://localhost:8082/api/cluster/fire/api/variables/AlarmActive \
-d '{"value": true}'
# Reload a task on a specific minion
curl -X POST http://localhost:8082/api/cluster/pdu/api/tasks/MainTask/reload
# Nested: supervisor → edge boss → minion
curl http://localhost:8082/api/cluster/edge-boss/api/cluster/crac/api/variablesRemote management of distributed GOPLC instances from the Boss IDE:
- mDNS Auto-Discovery — automatically finds GOPLC nodes on the local network via DNS-SD
- Persistent Node Registry — fleet-registry.json survives restarts, manual node add/remove
- Snapshot Store — SQLite metadata + gzip files on disk, auto-save on download/import, auto-prune at 50 local snapshots
- Remote Snapshot Management — browse any node's history, push snapshots (single or bulk), drift detection across healthy nodes
- Project Deploy — atomic restore+validate+download+start in one API call (
POST /api/project/deploy) - System Control — graceful shutdown (
POST /api/system/shutdown), process re-exec restart (POST /api/system/restart), runtime restart - Fleet UI — per-node snapshot browser, deploy/multi/export/delete, collect/export/purge toolbar, drift banner, column sorting, auto-refresh 15s
Minions publish DL_* prefixed variables to the Boss via DataLayer. The Boss aggregates variables from all minions and rebroadcasts, creating a real-time variable mesh across the cluster.
# Boss config
api:
port: 8082
cluster:
members:
- name: crac
socket: /run/goplc/crac.sock
- name: fire
socket: /run/goplc/fire.sock
- name: remote-plc
url: http://10.0.0.50:8500
# Minion config
api:
socket: /run/goplc/crac.sock # No port needed

Click to watch: Boss/Minion Cluster Demo — single-port IDE controlling boss and minions with separate tasks, scan times, and live variable windows
Measured on a 24-core / 32-thread AMD system running PID loop workloads:
| Metric | Result |
|---|---|
| Monolithic vs. Distributed | 10.4x throughput improvement (same 1,000-line workload, 10 minions) |
| Linear Scaling | 97.7% efficiency at 400 minions, 94.9% at 500 |
| Peak Throughput | 620,949 aggregate scans/s at 50μs scan (31 minions, 100.1% efficiency) |
| DataLayer Latency | 1.7μs avg, 5.5μs p95, 8.2μs p99 |
| RT Mode Jitter | 5.5x reduction at p95 (890μs → 163μs) |
| Container Overhead | ~2% scan time, 0% scaling efficiency |
| Projected (768 threads) | ~13M aggregate scans/s, ~12,000 simultaneous PID loops |
Industry Comparison:
| Platform | Min Cycle | Max Cores | Aggregate Scans/s | Architecture |
|---|---|---|---|---|
| Beckhoff TwinCAT 3 | 50μs | 4-8 (1 per task) | ~20,000 | Windows CE/RTOS |
| Siemens S7-1500 | 250μs | 1 (ASIC) | ~4,000 | Proprietary |
| Allen-Bradley ControlLogix | 500μs | 1 (per chassis) | ~2,000 | Single-threaded |
| GOPLC | 50μs | All available | 620,949 | Distributed goroutines |
See the full Clustering Whitepaper (PDF) for architecture details, methodology, and complete benchmark data. See also the DC Simulation Hardware Whitepaper for hyperscale deployment estimates (50 MW–1 GW).
GOPLC supports hot-standby redundancy with automatic failover for high-availability deployments. A Supervisor monitors identical primary and backup clusters — if the primary fails, the supervisor switches to the backup with zero data loss.

Three redundancy strategies with sub-second failover, automatic failback, and zero data loss via store-and-forward buffering:

Both clusters independently publish telemetry for failover timing analysis and data continuity verification:

Optional JWT-based authentication that protects engineering endpoints while leaving operator paths open.
| Path Type | Examples | Authentication |
|---|---|---|
| Public | /hmi/*, /api/variables, /api/tags, /ws |
None required |
| Protected | /ide/*, /api/programs, /api/runtime, /api/tasks, /api/cluster, /api/config, /api/debug |
Bearer token required |
- Disabled by default — zero friction for development and standalone use
- HMAC-SHA256 tokens with configurable expiry (no external dependencies)
- Bcrypt password verification for secure credential storage
- Login page with token refresh and logout
- Operator-friendly — HMI dashboards and variable read/write work without credentials
api:
auth:
enabled: true
jwt_secret: "your-jwt-secret" # auto-generated if empty (won't survive restart)
token_expiry_hours: 24
users:
- username: admin
password_hash: "$2a$10$..." # bcrypt hash# Generate a bcrypt hash for the config
goplc auth hash-password mypassword
# Generate a random JWT secret
goplc auth generate-secretHMAC-signed license keys with cloud activation. Runs in a 2-hour restartable demo mode until activated.
- Get your installation ID:
GET /api/license/info - Enter your license key in the IDE or via API
- Automatic cloud activation validates the key and binds to your machine
- Done — license persists across restarts and updates
| Status | Meaning |
|---|---|
demo |
2-hour trial, restartable via API |
active |
Valid unlock code installed |
expired |
Demo expired, activation required |
# Check license status and get installation ID
curl http://localhost:8082/api/license/info
# Activate with an unlock code
curl -X POST http://localhost:8082/api/license/activate \
-H "Content-Type: application/json" \
-d '{"unlock_code": "GOPLC-XXXXXXXXXXXXXXXX"}'
# Restart the 2-hour demo timer
curl -X POST http://localhost:8082/api/license/restart-demoLicense cache is Fernet-encrypted and stored outside the bind-mounted data directory. Unlock codes are HMAC-signed — the binary verifies only; generation uses a separate developer-side tool. The PURGE_LICENSE=true environment variable wipes license data on startup for clean reinstalls.
Package GOPLC as an Ubuntu Core snap for the Bosch ctrlX CORE ecosystem (ARM64, strict confinement).
make snap-stage # ARM64 target (ctrlX CORE)
make snap-stage-amd64 # amd64 (local testing)
./build-snap.sh # Full build + snapcraft packPost-install configuration via snap set:
sudo snap set goplc-runtime api-port=8082
sudo snap set goplc-runtime cluster=true minions=4
sudo snap restart goplc-runtimeTwo approaches for integrating with the ctrlX ecosystem:
Direct read/write of EtherCAT digital I/O modules with dual transport:
// Native IPC mode — 500 Hz polling, sub-millisecond latency
CTRLX_EC_CREATE('ec1', '', '', '', 'XI110116', 'XI211116', 16, 16, 10, 'dl');
CTRLX_EC_START('ec1');
// Read inputs, write outputs
di_val := CTRLX_EC_READ_DI('ec1', 1);
write_ok := CTRLX_EC_WRITE_DO('ec1', 1, TRUE); // Returns FALSE if disconnected
// Switch to REST mode (no recompile needed)
CTRLX_EC_CREATE('ec2', '', '', '', 'XI110116', 'XI211116', 16, 16, 100, 'rest');
| Transport | Polling | Avg Scan | I/O Rate | Determinism |
|---|---|---|---|---|
| REST | 100ms | 1.2ms | 10 Hz | Variable (HTTP stack) |
| Native IPC | 2ms | 0.69ms | 500 Hz | Consistent (direct IPC) |
- Uses official Bosch
ctrlx-datalayer-golang/v2SDK (CGo) for native IPC - Verified on ctrlX CORE X3 (ARM64) with physical loopback testing
CTRLX_EC_WRITE_DOreturns FALSE on disconnect — ST-level fault detection- 10 ST functions for full I/O lifecycle management
Bidirectional variable sync between GOPLC and the ctrlX Data Layer:
ctrlx_datalayer:
enabled: true
base_url: "https://localhost"
username: "ctrlx-user"
password: "ctrlx-password"
publish_prefix: "goplc-runtime" # ctrlX node path prefix
publish_vars: ["temp_c", "pump_on"] # PLC → ctrlX Data Layer
subscribe_vars: ["ctrlx/setpoint"] # ctrlX Data Layer → PLC
sync_interval_ms: 100
insecure_tls: true- PLC variables published as ctrlX Data Layer nodes under
publish_prefix/ - ctrlX nodes read back into PLC variables on each sync interval
- Authenticates via ctrlX identity manager JWT
- Pure HTTP/REST — no native libraries required
GOPLC as a universal protocol gateway for data center infrastructure management — bridging CRAC units, PDUs, UPS systems, fire suppression, and building automation into a unified SCADA layer.
Corporate Layer (Grafana, SCADA, cloud)
│
Site Supervisor (GOPLC Boss)
├── OPC UA clients to each edge
├── MQTT subscriber (primary path)
└── DNP3 master (failover path)
│
Edge Modules (GOPLC Clusters)
Boss → per-protocol minions
├── Modbus TCP/RTU (CRAC, UPS, VFD)
├── BACnet/IP (AHU, dampers, lighting)
├── EtherNet/IP (power meters)
└── SNMP v3 (smart PDUs, switches)
- Primary: MQTT publish/subscribe (sub-second latency)
- Failover: DNP3 outstation with store-and-forward (SQLite buffer, GZIP + AES-256-GCM encryption)
- Automatic switchover when MQTT path goes stale
See the full Datacenter Gateway Whitepaper for architecture details and deployment examples. For scale analysis and cost modeling see the Hardware Gateway Whitepaper and Virtualized Gateway Whitepaper.
Pre-built binaries for Windows and Linux — single ~30 MB download, no installer needed.
| Platform | Architecture | Download |
|---|---|---|
| Windows | x86_64 | goplc-v1.0.520-windows.zip |
| Linux | x86_64 (amd64) | goplc-v1.0.520-linux-amd64.tar.gz |
| Linux | ARM64 (aarch64) | goplc-v1.0.520-linux-arm64.tar.gz |
Visit jmbtechnical.com/goplc/download to download the latest release.
What's included: goplc binary, launcher script (app-mode browser), config.yaml, and a sample counter.st program. Extract, run, and open your browser — that's it.
Licensing: Runs in a 2-hour restartable demo mode out of the box. Activate with a license key for unlimited use. See Licensing for details.
Visit jmbtechnical.com/goplc/download and grab the package for your platform.
# Linux
tar xzf goplc-v1.0.520-linux-amd64.tar.gz
cd goplc
# Windows — unzip goplc-v1.0.520-windows.zip# Linux — launches GOPLC and opens browser in app mode
./start-goplc.sh
# Windows — double-click start-goplc.bat
# Or run directly:
./goplc --config config.yamlNavigate to http://localhost:8082/ide/ in your browser.
Build a container from the downloaded binary:
FROM alpine:3.19
COPY goplc /usr/local/bin/goplc
COPY config.yaml /app/config.yaml
EXPOSE 8082 502
WORKDIR /app
ENTRYPOINT ["goplc", "--config", "/app/config.yaml"]# Extract the Linux binary, then build and run
docker build -t goplc:latest .
docker run -d --name goplc \
-p 8082:8082 \
-p 502:502 \
-v $(pwd)/data:/app/data \
goplc:latest# config.yaml
runtime:
log_level: info
tasks:
- name: FastTask
type: periodic
scan_time_us: 100 # 100 microsecond scan
priority: 1
watchdog_ms: 10
programs:
- fast_control.st
- name: SlowTask
type: periodic
scan_time_ms: 100 # 100ms scan
priority: 10
programs:
- monitoring.st
protocols:
modbus:
enabled: true
port: 502
opcua:
enabled: true
port: 4840
nodered:
enabled: true
auto_start: true
ai:
provider: "claude"
api_key_env: "ANTHROPIC_API_KEY"
api:
port: 8082See the examples/st/ directory for 14 ready-to-run programs:
| Example | Description |
|---|---|
pid_control.st |
PID loop with anti-windup and bumpless transfer |
modbus_gateway.st |
Bridge between Modbus TCP devices |
modbus_client.st |
Modbus TCP client — registers, coils, read-verify |
data_sync.st |
Multi-PLC DataLayer synchronization |
alarm_handler.st |
Alarm management with shelving and history |
bacnet_client.st |
BACnet/IP client — read objects, track status |
dnp3_master.st |
DNP3 master — analog/binary inputs, pump control |
enip_scanner.st |
EtherNet/IP scanner — CIP tag read/write |
esp32_io.st |
ESP32 remote I/O — 8 DI, 8 DO, 3 AI, 2 PWM, NeoPixel |
fins_client.st |
Omron FINS client — DM word read/write |
iec104_client.st |
IEC 60870-5-104 client — SP, DP, floats, counters |
mqtt_publish.st |
MQTT pub/sub — telemetry, commands, liveness |
opcua_client.st |
OPC UA client — node read/write, method calls |
datalayer_ethercat.st |
ctrlX EtherCAT I/O — native IPC, DI/DO toggle |
See the examples/configs/ directory:
| Config | Description |
|---|---|
modbus_server.yaml |
Modbus TCP server with I/O mapping |
multi_plc.yaml |
DataLayer sync between PLCs |
realtime.yaml |
Real-time container mode |
full_stack.yaml |
All protocols enabled |


Click to watch: Stress Test Walkthrough
3 GOPLC instances running simultaneously with DataLayer synchronization:

Test Configuration:
- 3 PLCs with DataLayer TCP sync (server + 2 clients)
- 9 programs per PLC: math, arrays, strings, JSON, datetime, regex, crypto, datastructures
- Each PLC running ~4,500 lines of Structured Text
- Modbus TCP servers on each PLC (ports 5601-5603)
- Real-time variable synchronization across all nodes


PTR_QW Feature: New system constants for pointer arithmetic with I/O memory:
PTR_QW- Base pointer for output words (%QW)PTR_IW- Base pointer for input words (%IW)PTR_MW- Base pointer for marker words (%MW)
Enables efficient bulk I/O operations: (PTR_QW + offset)^ := value

Configuration:
- 5000 concurrent Modbus TCP servers on ports 7000-11999
- ST program: Counter + GSV_TASKSCANTIME() writing to %QW0-1
- All servers receive same PLC outputs via driver broadcast
Results:
| Metric | Value |
|---|---|
| Scan Execution Time | 20-50µs (avg 30µs) |
| Memory Usage | 780 MB (~156 KB/server) |
| CPU Usage | 50% |
| Stability | 12+ minutes, 0 errors |

Driver Broadcast Architecture:


Test Configuration:
- Intel i9-13900KS (32 threads), 62 GB RAM
- Single-process architecture with goroutine-based minions
- Each minion has fully isolated PLCContext (protocols, connections, data)
- Boss API proxies to minions via Unix sockets
Idle Minions (scheduler only):
| Minions | RAM | Per Minion | CPU |
|---|---|---|---|
| 1,000 | 3.4 GB | 3.4 MB | 24% |
| 5,000 | 20 GB | 4.0 MB | 67% |
| 10,000 | 37.4 GB | 3.9 MB | 108% |
Running ST Programs (50x SIN/COS, string ops, 100ms scan):
| Minions | RAM | Per Minion | CPU | Load |
|---|---|---|---|---|
| 1,000 | 15.8 GB | 15.8 MB | 63% | 2.96 |
| 3,000 | 48 GB | 16 MB | 188% | 7.38 |
Key Findings:
- Idle: ~3.9 MB/minion → ~9,000 minions at 75% resources
- Running: ~16 MB/minion (4x overhead) → ~2,500 minions at 75% resources
- Memory is the limiter, not CPU
| Metric | Result |
|---|---|
| Scan execution time | 20-50μs (5000 servers) |
| Minimum scan interval | 100μs sustained |
| Modbus throughput | 89,769 req/sec (100 connections) |
| Modbus scalability | 5000 servers (780 MB), 500 clients (0 errors) |
| PTR_QW writes | ~300,000 registers/sec |
| DataLayer latency | <1ms P50, <3ms P99 |
| Memory footprint | ~65MB typical, ~150MB with DataLayer |
| Distributed speedup | 10.4x throughput (same workload, 10 minions) |
| Aggregate throughput | 620,949 scans/sec (31 minions at 50μs) |
| ST functions | 1,900+ available |
| Lines of code | 280,000+ Go |

Measured on Bosch ctrlX CORE X3 (ARM64 Cortex-A53) with XI110116 (16 DI) + XI211116 (16 DO) physical loopback:
| Metric | REST Mode | Native IPC Mode |
|---|---|---|
| Poll interval | 100ms | 2ms |
| Task scan time | 50ms | 5ms |
| Avg scan duration | 1.2ms | 0.69ms |
| Max scan duration | 30ms | 13ms |
| I/O update rate | 10 Hz | 500 Hz |
| Read errors | 0 | 0 |
| Watchdog trips | 0 | 0 |
The native IPC path uses the official Bosch ctrlx-datalayer-golang/v2 SDK — direct function calls through libcomm_datalayer.so instead of HTTP/TLS/JSON. The EtherCAT bus itself cycles at 2ms (500 Hz), and native IPC matches that rate with zero errors.
Full REST API for integration with SCADA, MES, and custom applications.
| Endpoint | Description |
|---|---|
GET /api/tags |
List all tags with values |
GET/PUT /api/variables/:name |
Read/write variables |
POST /api/runtime/start |
Start PLC runtime |
POST /api/runtime/stop |
Stop PLC runtime |
POST /api/tasks/:name/reload |
Hot-reload a single task |
GET /api/diagnostics |
Full runtime diagnostics |
GET /api/capabilities |
List supported protocols, functions, clustering |
GET /api/docs/functions |
All 1,900+ function signatures |
GET /api/analyzer/transactions |
Protocol capture data |
GET /api/cluster/:name/*path |
Proxy to cluster minion |
GET /api/nodered/status |
Node-RED subprocess status |
GET /api/debug/step/state |
Debugger state and position |
GET /ws |
WebSocket for real-time updates |
See docs/API.md for complete API reference.
Runtime-toggleable logging with per-module granularity. 15+ modules including webui, nextion, modbus, fins, enip, opcua, datalayer, hal, and more.
# Get debug status for all modules
curl http://localhost:8082/api/debug/status
# Set module-specific log level
curl -X PUT http://localhost:8082/api/debug/runtime/modules/modbus \
-d '{"level": "trace"}'
# View debug ring buffer (optionally filter by module)
curl http://localhost:8082/api/debug/log?module=modbus
# Enable/disable entire debug system
curl -X POST http://localhost:8082/api/debug/runtime -d '{"enabled": true}'GOPLC is designed for:
- Industrial Automation - Replace or supplement traditional PLCs
- Protocol Gateway - Bridge between different protocols (data center, building, utility)
- Edge Computing - Run on Raspberry Pi, industrial PCs, Bosch ctrlX CORE
- Distributed Control - Boss/Minion clustering for large installations
- HMI/SCADA Backend - Node-RED dashboards + high-performance data collection
- Fleet Management - Centrally manage and deploy to hundreds of remote GOPLC nodes
- Robotics & Motion - MC_* motion control functions, servo coordination, sensor fusion
- Simulation - Test automation logic without hardware
- Education - Learn PLC programming with modern tools
| Whitepaper | Description |
|---|---|
| Clustering: Distributed Real-Time PLC Performance (PDF) | Architecture, benchmark methodology, and measured results: 10.4x throughput improvement, 620,949 aggregate scans/sec, linear scaling to 500+ minions, water treatment plant validation |
| Datacenter Gateway: Universal Protocol Gateway (PDF) | Three-tier DC hierarchy, 12 protocol drivers, dual-path MQTT + DNP3 store-and-forward, redundancy strategies, AI-assisted commissioning, ctrlX CORE deployment |
| DC Simulation: Hardware Gateway Architecture (PDF) | 11 device simulators, 6 gateway blueprints, scale estimates 50 MW–1 GW, ctrlX CORE edge SBC deployment, standalone vs cluster decision matrix, full cost model |
| DC Simulation: Virtualized Gateway Architecture (PDF) | Server VM gateways via Cisco SVI routing, 51–66% total cost reduction vs hardware, migration path, IEC 62443 security considerations |
| The Operator's Revenge: Industrial Control at Software Speed | Why industrial automation needs a software-native PLC runtime — 30 MB install vs multi-GB IDE installs, browser-based programming, zero proprietary cables |
| Planetary Scale: From Edge to Orbit | 10,000 full runtimes on one desktop, 250M+ projected deterministic runtimes at datacenter scale, memory-wall analysis, DataLayer at planetary scale |
| Humanoid Robotics: Real-Time Control for Next-Gen Robots (PDF) | GOPLC as a real-time control backbone for humanoid robotics — servo coordination, sensor fusion, safety interlocks, deterministic motion planning |
GOPLC is proprietary software. Contact jbelcher@jmbtechnical.com for licensing inquiries.
Built with Go
Industrial-grade automation for the modern world