Current Behavior
When enabling POSHOLD the wing looses altitude and even pitches down actively, mainly on the very first turn.
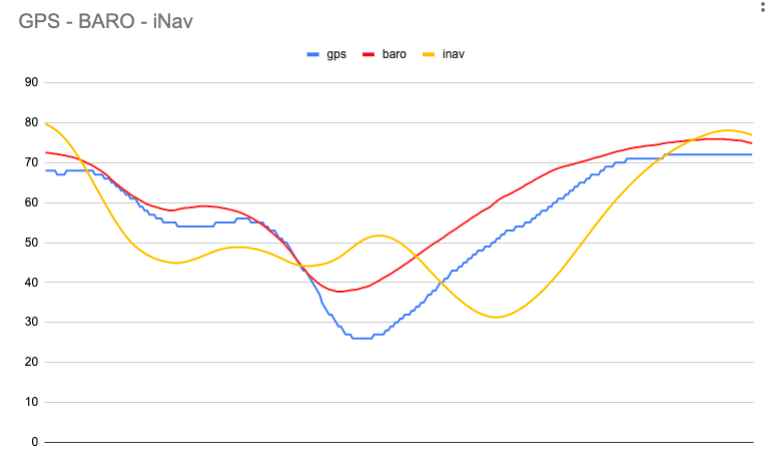
The barometer and GPS values are showing the decent, but the iNav calculated altitude seems to lag behind somehow.
This is the raw DVR: https://www.dropbox.com/s/pvkoux7n90n2hqy/pict0430_poshold_clean.mp4?dl=0
Here is the snipped, overlayed with blackbox data, slowed down: https://www.dropbox.com/s/a5m4jshwm3jy1y5/c2_raidix_poshold_pitch_down.mov?dl=0
This is a chart of the three altitude readings for the scene above:
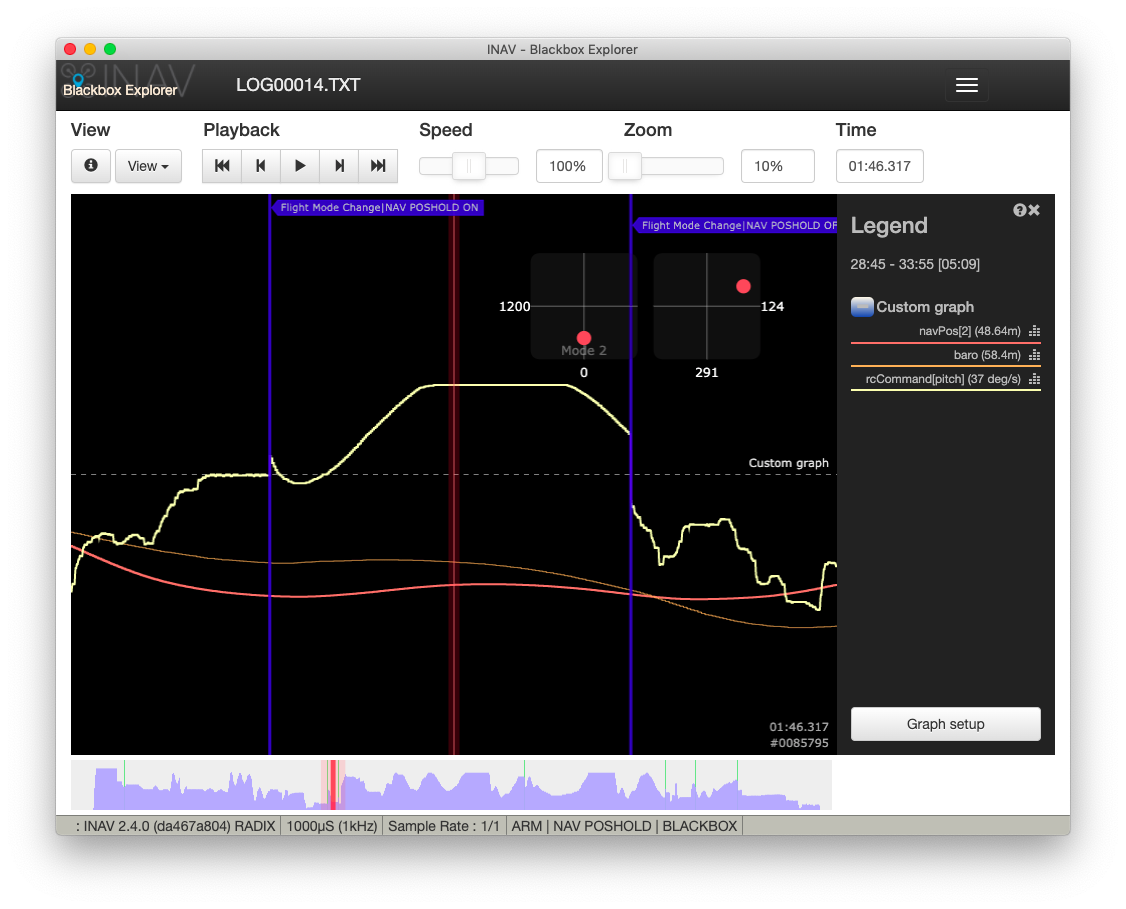
This is the BBE on the POSHOLD timeframe where alt and pitch input can be seen:
Thanks a lot in advance!
Steps to Reproduce
- enable POSHOLD
Expected behavior
iNav altitude "closer" to sensors, not taking nose down in POSHOLD.
Suggested solution(s)
n/a
Additional context
Setup:
- TBS Caipirinha 2 PNP
- BN220 GPS
- iNav 2.3, 2.4
- reduced airflow using open-cell foam on airduct and barometer itself
- trim verified, last auto-trim midpoints to 1491/1515
- pitch-align is set
- fw_reference_airspeed increased to 1666 (60kmh)
- ANGLE works
- 3DCRS works
some config items:
set inav_use_gps_velned = ON
set inav_w_z_baro_p = 0.400
set inav_w_z_gps_p = 0.200
set inav_w_z_gps_v = 0.100
set nav_fw_cruise_thr = 1400
set nav_fw_bank_angle = 35
set nav_fw_pitch2thr = 17
set nav_fw_pos_z_p = 50
set nav_fw_pos_z_i = 5
set nav_fw_pos_z_d = 5
set max_angle_inclination_rll = 600
set max_angle_inclination_pit = 600
set fw_reference_airspeed = 1666
full dump:
https://pastebin.com/rACwABti
- FC Board name and vendor: BrainFPV Radix (BMP280 Barometer)
- INAV version string: INAV/RADIX 2.4.0 Mar 8 2020 / 11:01:38 (da467a8)
Current Behavior
When enabling POSHOLD the wing looses altitude and even pitches down actively, mainly on the very first turn.
The barometer and GPS values are showing the decent, but the iNav calculated altitude seems to lag behind somehow.
This is the raw DVR: https://www.dropbox.com/s/pvkoux7n90n2hqy/pict0430_poshold_clean.mp4?dl=0


Here is the snipped, overlayed with blackbox data, slowed down: https://www.dropbox.com/s/a5m4jshwm3jy1y5/c2_raidix_poshold_pitch_down.mov?dl=0
This is a chart of the three altitude readings for the scene above:
This is the BBE on the POSHOLD timeframe where alt and pitch input can be seen:
Thanks a lot in advance!
Steps to Reproduce
Expected behavior
iNav altitude "closer" to sensors, not taking nose down in POSHOLD.
Suggested solution(s)
n/a
Additional context
Setup:
some config items:
set inav_use_gps_velned = ON
set inav_w_z_baro_p = 0.400
set inav_w_z_gps_p = 0.200
set inav_w_z_gps_v = 0.100
set nav_fw_cruise_thr = 1400
set nav_fw_bank_angle = 35
set nav_fw_pitch2thr = 17
set nav_fw_pos_z_p = 50
set nav_fw_pos_z_i = 5
set nav_fw_pos_z_d = 5
set max_angle_inclination_rll = 600
set max_angle_inclination_pit = 600
set fw_reference_airspeed = 1666
full dump:
https://pastebin.com/rACwABti