Update move groupe c++ interface doc#563
Conversation
Give reference to the fact that in some cases one has to enforce the joint_model_state_space
|
Thanks for helping in improving MoveIt and open source robotics! |
|
Ah, this might explain some trouble I was having awhile ago. Can you also please add a note to the .rst file here? That will get seen by more eyes than the C++ comments, I bet. |
|
The .rst file itself does not contain the tutorial. As far as I understood it, the tutorial will be auto-generated by the tutorial-formatter.py script using the comments within the .cpp file. |
 AndyZe
left a comment
AndyZe
left a comment
There was a problem hiding this comment.
You're right! It looks good except for a whitespace issue. Will approve provided you clean up that whitespace. Thanks for a nice contribution.
| // By enforcing ``joint space`` the planning process will use rejection | ||
| // sampling to find valid requests. Please not that this might | ||
| // increase planning time considerably. | ||
|
|
There was a problem hiding this comment.
Please replace these two blank lines with a single line:
//
|
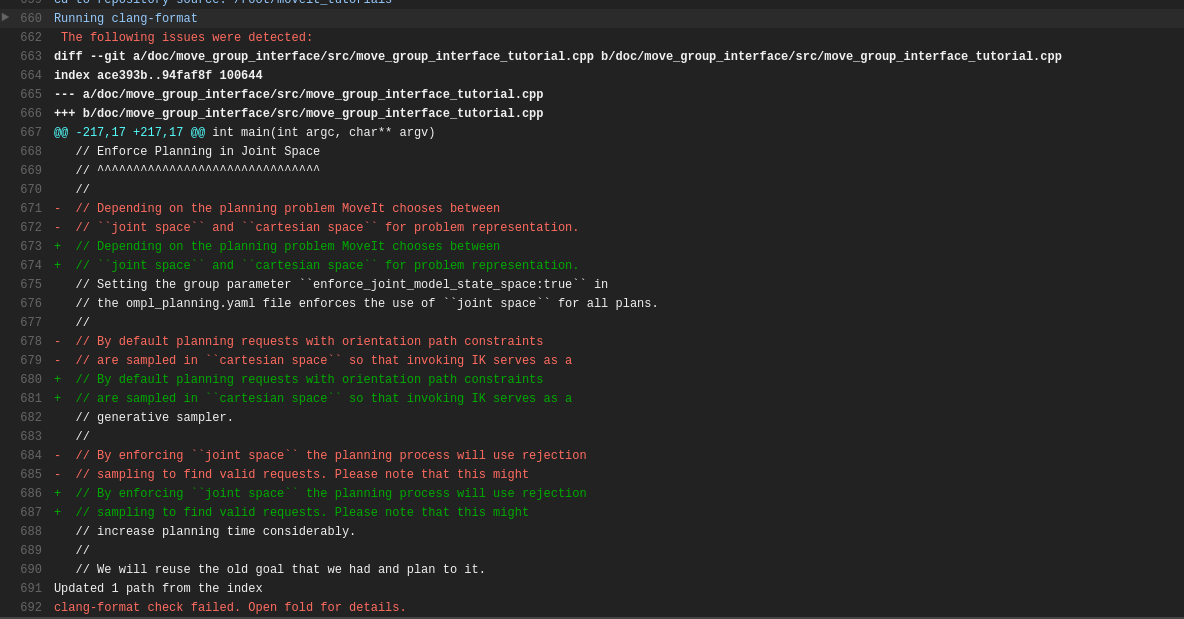
The clang format check failed. Check out the log here: https://travis-ci.com/github/ros-planning/moveit_tutorials/jobs/457309704 Should be easy to fix, though |
|
Here are the issues. If you want, you can run clang-format to fix this automatically. See here [clang-format Auto Code Formatting]
|
|
Congrats on getting your first MoveIt pull request merged and improving open source robotics! |
* Update move groupe c++ interface doc Give reference to the fact that in some cases one has to enforce the joint_model_state_space * Removed white spaces and fixed typo * Removed trailing whitespaces
Description
Took me ages to realize that it's necessary to enforce the joint_model_state_space when using orientation path constraints in close proximity to the robot's base link.
Give reference to the fact that in some cases one has to enforce the joint_model_state_space.