[For testing, do not merge] Debug Bullet self collision checks#560
[For testing, do not merge] Debug Bullet self collision checks#560AndyZe wants to merge 4 commits intomoveit:masterfrom
Conversation
|
Thanks, I'll look into it on the weekend |
|
I believe this is a solution for this problem. Add to collision_env_bullet.cpp checkSelfCollisionHelper():
|
|
Can someone give me a hint what this warning means? Appears when shutting down the interactive robot. |
|
In the context of MoveIt, a typical reason for this warning is that you are releasing the |
|
Thanks Robert. I am having some workflow issues, maybe you (or anyone else) can help me out here too: I want to build Of course I can do a |
|
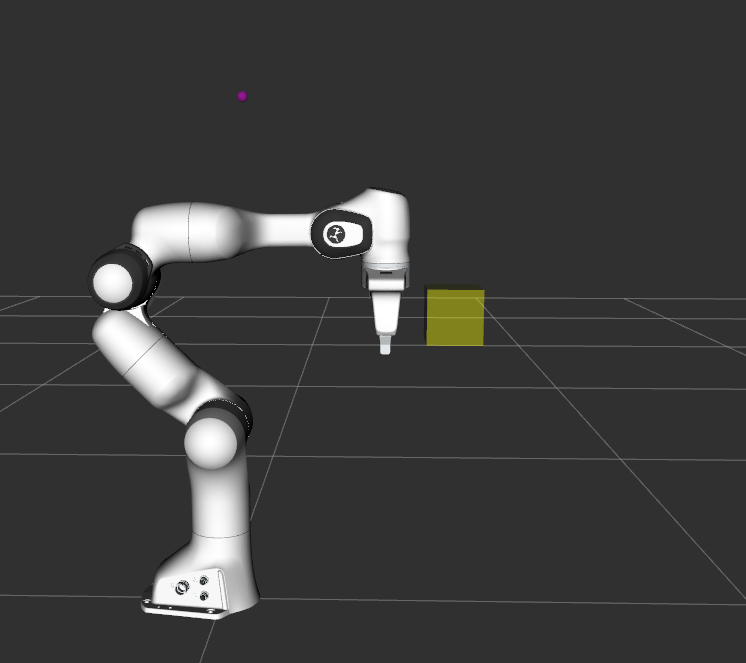
@j-petit I'm back to working on this a bit. I started visualizing the collision points always. When it fails, it seems to be that the link transforms aren't right. See pink dot here...
|
|
Although if I stop using this version:
And use this version instead...
the result is reasonable. 👍 |
|
So it seems this isn't actually a bug and I should close this PR. What do you think, @j-petit ? |
|
Closing until somebody comments otherwise |
|
@AndyZe I think this's a bug in the tutorial calling |
Well, if you pass the RobotState as an arg (like the tutorial does) it works fine. It was just my modification that had an issue. |
|
Both of your solutions are working, but I think changing the |
checkSelfCollision() reports that the robot is always in collision.
Test with:
roslaunch moveit_tutorials bullet_collision_checker_tutorial.launch