[FR] Resolution de problemes
Nous avons eu beaucoup de problèmes avec le turtlebot4, à la fois le pro et le lite. Pour une raison ou une autre, nous n'arrivions pas à lui faire exécuter le code du tutoriel de navigation.
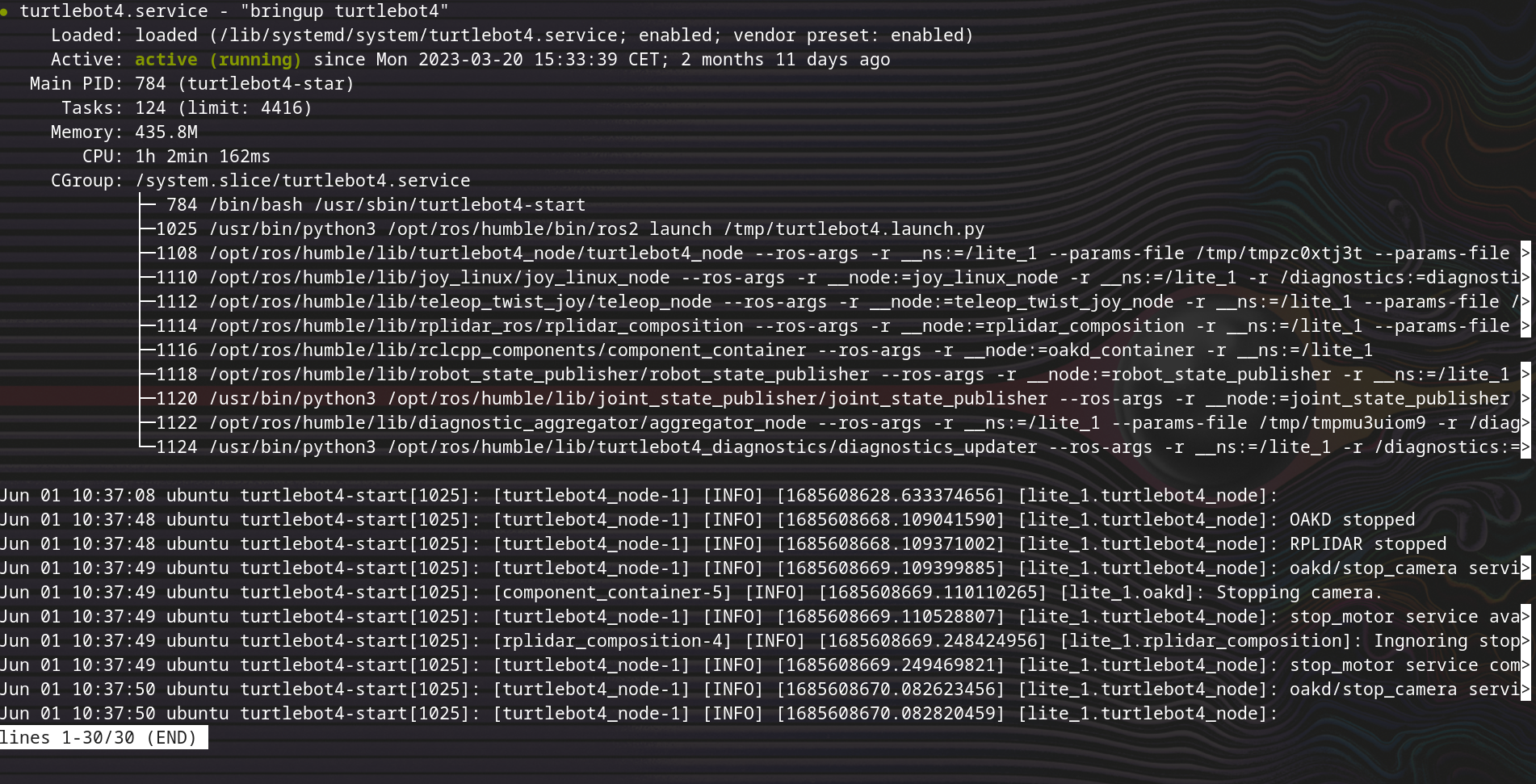
Après quelques recherches, nous avons trouvé en utilisant le turtlebot4-setup, dans la section ROS Setup, Robot upstart, Status, les logs du script d'état du robot. (Ce qui est en quelque sorte équivalent à systemctl status turtlebot4.service)
 Nous vous recommandons de garder un œil sur la page des problèmes du repo github du turtlebot4, vous trouverez peut-être quelqu'un qui à le même problème (ou vous pouvez le signaler aux dev pour qu'il trouve un correctif)
https://github.com/turtlebot/turtlebot4/issues
Nous vous recommandons de garder un œil sur la page des problèmes du repo github du turtlebot4, vous trouverez peut-être quelqu'un qui à le même problème (ou vous pouvez le signaler aux dev pour qu'il trouve un correctif)
https://github.com/turtlebot/turtlebot4/issues
Dans ces logs, nous avons trouvé plusieurs erreurs, indiquant que le service était en état d'échec.
Le problème était dû à un paquet manquant, tout ce que nous avions à faire pour résoudre le problème est d'installer le paquet ros-humble-joint-state-publisher en utilisant apt
Ce soucis a été corriger par les dev dans le tag 1.0.3
 Après cela, redémarrez le robot et vérifiez à nouveau les log onces, le service devrait être en place
Après cela, redémarrez le robot et vérifiez à nouveau les log onces, le service devrait être en place
Vous pouvez avoir le bonheur, avec le pro, d'avoir ros2 qui disparaît ! (Un plaisir) C'est du au fait que le fichier /etc/turtlebot4/setup.bash, qui se lance au démarrage du robot (exécuter dans le .bashrc) n'existe plus ! Vous pouvez le retrouver (ici), faites juste attention, certaines de vos config risquent d'avoir sauté !
Un autre problème que nous avons rencontré était l'heure et la date du robot qui n'étaient pas du tout réglées. Nous avons utilisé timedatectl pour régler la configuration comme nous le souhaitions.
timedatectl set-timezone "Europe/Paris" #Set timezone
timedatectl set-ntp true #Set sync with ubuntu ntp server
Nous utilisons actuellement le firmware humble 1.2 dpour la create " (trouvé ici) et nous avons un problème où le create se bloque à 100% au démarrage, aussi, parfois la create se bloque aléatoirement à 100% en utilisation.
Nous avons aussi eu des problèmes avec le diagnostic qui faisait laguer la raspberry parce qu'il utilisait trop de cpu, nous l'avons désactivé dans la lite_1 et la pro_1 en mettant la variable TURTLEBOT4_DIAGNOSTICS=0 dans le fichier /etc/turtlebot4/setup.bash.
On peut voir la température du raspberry en utilisant la commande suivante en mC° :
cat /sys/class/thermal/thermal_zone0/temp
La rasperry thermal throttle a partir de 60°C
Pour une raison inconnue, le lite_1 refusait de ce connecter au réseau du TPlink malgré une bonne configuration.
Journal de NetworkManager: systemctl status NetworkManger

Toute modification de la configuration, ou essai de connexion a la main via nmcli fut vain.
La 'solution' fut de connecter le robot sur le réseau 5Ghz de la box (Cela permet d’échanger les données plus rapidement, ce qui sembla aider lors de la navigation, mais la porté maximale était réduite)
Voici quelques commandes utiles qui peuvent vous aider à naviguer dans les logs de systemd :
systemctl status affiche l'état complet du système, utile si vous ne savez pas où regarder
systemctl start nom.service démarre un service donné
systemctl stop name.service arrête un service donné
systemctl enable name.service fait démarrer un service donné au démarrage du robot
systemctl disable name.service contraire de ce qui précède
En plus de lancer apt-get update && apt-get upgrade, faites de temps en temps turtlebot4-update, cela permettra de mettre à jour les paquets installés mais aussi de récupérer les nouveau paquets nécessaires au fonctionnement du robot.
Vérifier si le create 3 a un nouveau firmware est souvent une bonne idée, et vous pouvez le mettre à jour via son interface web sur pi-ip:8080
Attention également, le create ne peut se connecter qu'au wifi 2.4Ghz, donc connecter le pi au 5Ghz, et le create au 2.4Ghz semble être la configuration optimale (les deux bandes les connectent au même réseau virtuel).