Drone Yield Prediction Pipeline 2026 05
작성일: 2026-05-08
드론 이미지 → 송이별 무게 추정 → 밭 단위 수확량(kg) 예측. detection plateau에서 segmentation·합성·GSD 환산 axis로 전환한 변천사.
| 순서 | 문서 | 가져오는 것 |
|---|---|---|
| 1 | 포도밭 병해충 탐지 및 수확량 예측 | 프로젝트 동기 |
| 2 | Drone Detection Progression 2026-04 | detection plateau 결론 |
| 3 | 이 문서 (Yield Pipeline) | detection 이후 → 수확량 예측 end-to-end |
| 항목 | 값 |
|---|---|
| 출발점 | detection mAP50-95 = 0.286 plateau (4-way fair chain 검증 완료) |
| 목적 | bbox만으론 무게 추정 불가 → segmentation + 면적 + GSD → kg |
| 현재 단계 | end-to-end PoC 완료, 무게 GT calibration 대기 |
| 검증 이미지 | Gemini AI 측면 시점 + drone test 29장 |
| 주요 axis | YOLO det / SAM3 mask / wire/post 검출 / 합성 데이터 / HSV color filter |
drone img
├─ Post detector (SAM3 text) → 기둥 픽셀 길이
│ └─→ 알려진 실측 (3m, 1.5m) → GSD (mm/px)
│
├─ Bunch detector (YOLO + SAM3 mask) → 송이 bbox + mask
│ └─→ mask area (px²) × GSD² → 실측 면적 (cm²)
│
├─ HSV color filter → grape vs leaf 분류
│
└─→ Weight estimator (면적 → g) → 합산 → 이미지 yield (kg)
YOLO mixed-best detection → SAM3 box prompt → mask. 후처리 4단계 누적:
- bbox NMS (IoU 0.5)
- Mask clip to bbox + 20% margin — SAM3 leak 방지
- Mask-IoU NMS (IoU 0.5) — 모양 기반 dupe
- Pixel-argmax overlap resolve — 인접 송이 픽셀 분배
| 단계 | total bunches | median area |
|---|---|---|
| YOLO 원본 | 395 | — |
| + bbox NMS | 335 | 2233 px² |
| + mask NMS + clip | 325 | 2433 px² |
| Before | After |
|---|---|
| random color, alpha edge 어색 | distinct color (golden HSV) + boundary contour + #id 라벨 |
 32 송이 밀집 케이스 — bunch별 distinct color + boundary contour로 인접 송이 분리
32 송이 밀집 케이스 — bunch별 distinct color + boundary contour로 인접 송이 분리
| 시도 | drone test 29장 합격률 (CV<10%) |
|---|---|
| (a) Hough 기본 | 0/18 (0%) |
| (b) LSD only | 8/20 (40%) |
| (c) LSD + RANSAC spacing filter | 9/20 (45%) |
→ 영상처리 단독으론 한계. Wire는 fallback 위치, post가 primary.
SAM3.set_text_prompt("wooden post") zero-shot. 좌·우 기둥 자동 검출 + fragment 합치기. 학습 없이 안정적.
테스트: Gemini AI vineyard (3m × 1.5m 가정)
| Step | 결과 |
|---|---|
| Post detection | 좌·우 기둥 2개 자동 |
| GSD 수평 | 3000mm / 2104px = 1.43 mm/px |
| GSD 수직 | 1500mm / 1426px = 1.05 mm/px |
| Perspective ratio | 0.74 (수직 26% 압축) |
| Bunch detection | 79 raw → 53 (NMS·argmax 후) |
| HSV 분류 | grape 34 / leaf 18 / unc 1 |
| Yield (grape only) | 2.26 kg (avg 67 g/송이) |
| Before (conf 0.20, no HSV) | After (conf 0.05 + HSV) |
|---|---|
| 31 detection 모두 합산 (잎 outlier 포함) | grape만 합산, leaf 자동 제외 |
| 3.91 kg (잎 outlier로 부풀림) | 2.26 kg (정상 wine grape avg) |
| 뒷 라인 송이 누락 | conf 낮춰 catch |
| Variant | 학습 도메인 |
|---|---|
| (a) yolov8m mixed-best | drone top-down (학습) |
| (b) yolo11m fair-chain | 동상 |
| (c) SAM3 text "grape bunch" | 일반 web (CLIP 학습) |
| Variant | grape | leaf | leaf% |
|---|---|---|---|
| yolov8m | 34 | 18 | 34% |
| yolo11m | 49 | 21 | 28% |
| SAM3 text ⭐ | 39 | 1 | 2.5% |
| Variant | grape | leaf | leaf% |
|---|---|---|---|
| yolov8m ⭐ | 38 | 4 | 9% |
| yolo11m | 34 | 4 | 10% |
| SAM3 text | 20 | 3 | 13% |
| Image type | 최적 detector | 이유 |
|---|---|---|
| 측면 / ground-level | SAM3 text | 송이 전체 모양 보임 → CLIP 학습 분포 (web) 에 가까움 |
| 드론 top-down | YOLO (학습한 거) | drone domain specialized |
→ 시점·도메인이 결정 요인. 학습 도메인 = inference 도메인이어야 정확.
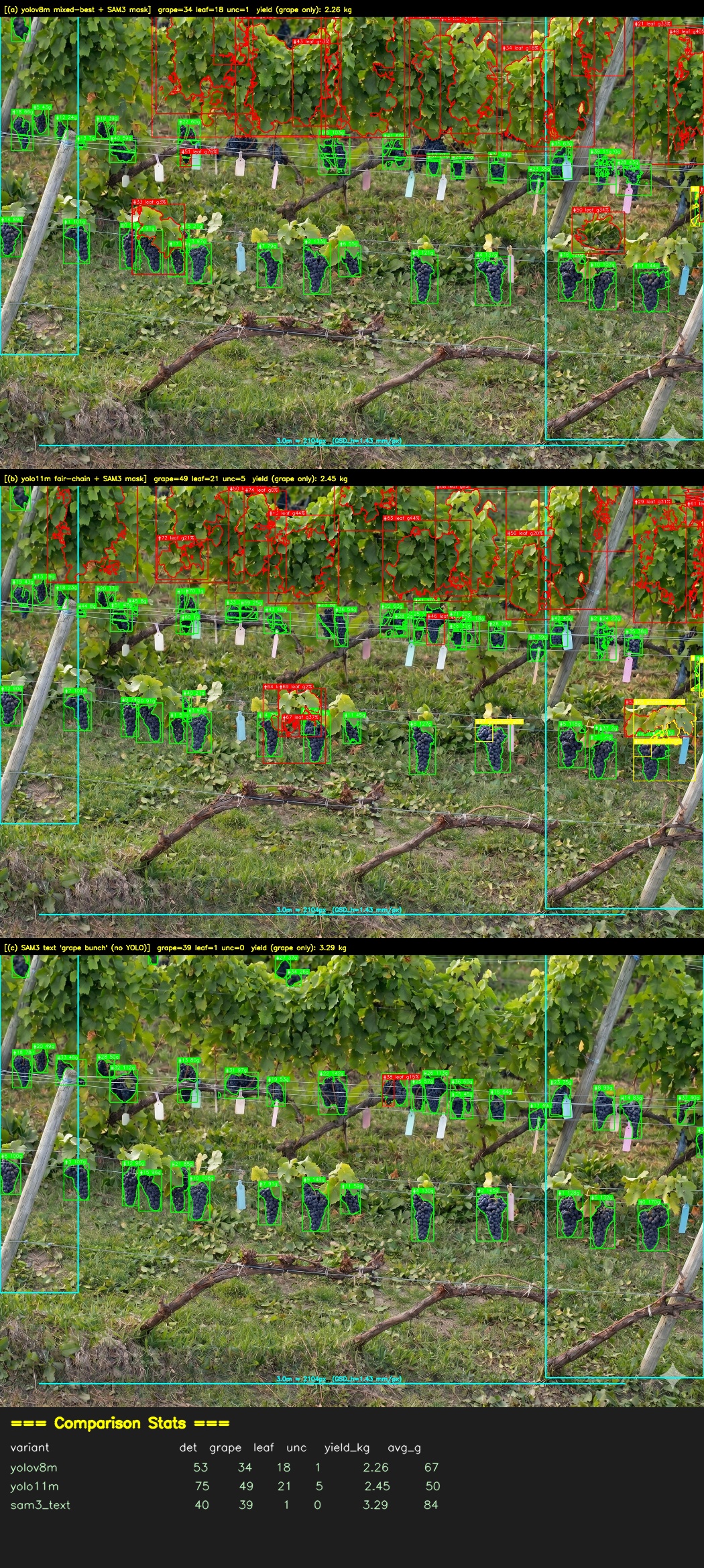 AI 측면 시점에서 SAM3 text가 leaf 거의 없음 (1/40, 2.5%) — winner는 SAM3 text
AI 측면 시점에서 SAM3 text가 leaf 거의 없음 (1/40, 2.5%) — winner는 SAM3 text
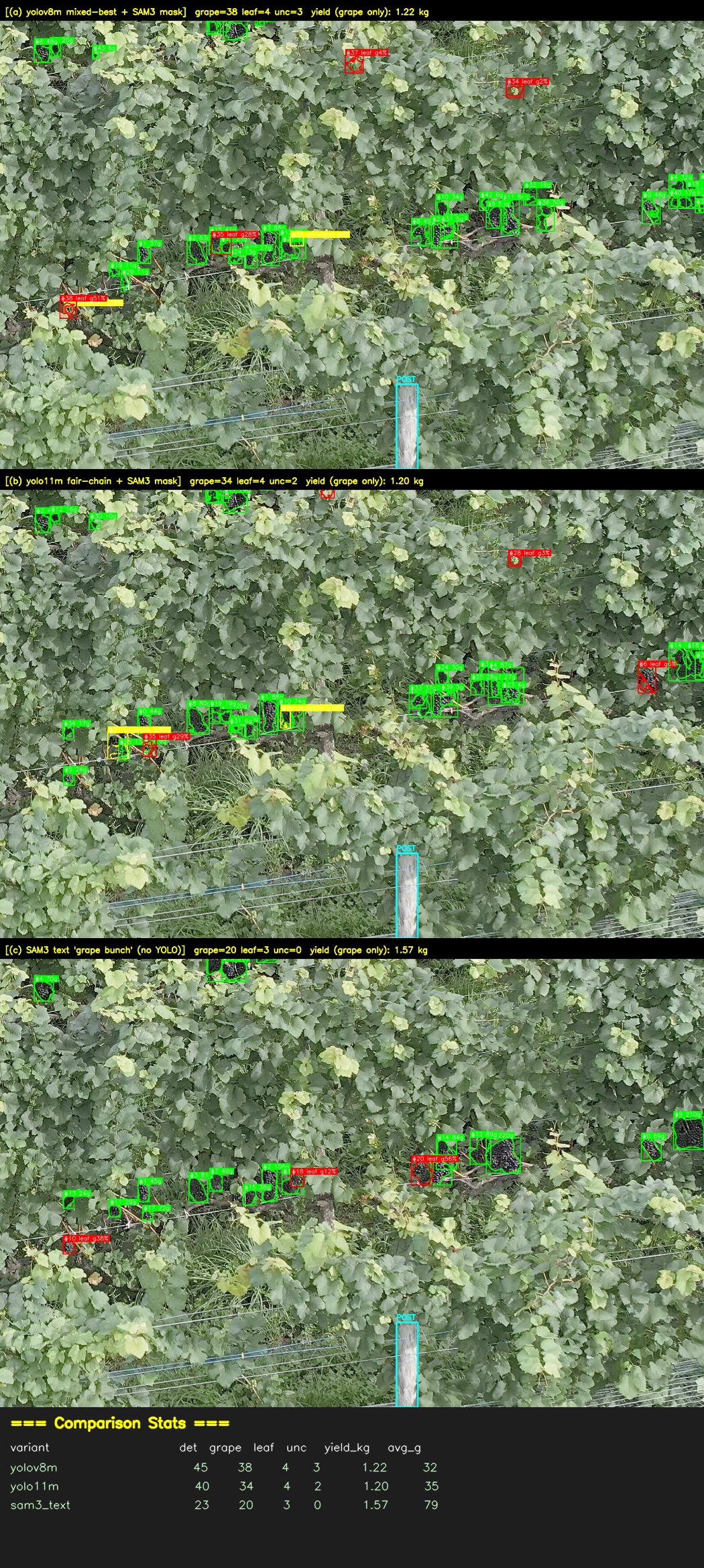 같은 3 variants가 drone top-down에서는 winner 뒤집힘 — yolov8m이 송이 가장 많이 잡음 (38), SAM3 text는 절반만 catch (20)
같은 3 variants가 drone top-down에서는 winner 뒤집힘 — yolov8m이 송이 가장 많이 잡음 (38), SAM3 text는 절반만 catch (20)
빈 vineyard tile (40장, 8K → 4분할) + 송이 RGBA library (drone 추출 328개) → 합성.
| 항목 | v1 (random + alpha) | v2 (wire-aware + Poisson) |
|---|---|---|
| 위치 | 완전 random (하늘/땅에도) | wire 위 매달림 (LSD 활용) |
| Blending | alpha (가장자리 도드라짐) | Poisson seamlessClone (색·톤 자연) |
| 합성 이미지 | 120 | 120 |
| 총 송이 paste | 912 | 944 |
 송이가 하늘·땅에도 random 출현, alpha 가장자리 도드라짐
송이가 하늘·땅에도 random 출현, alpha 가장자리 도드라짐
 송이가 wire 라인 (노랑) 근처에 매달림, Poisson으로 색·톤 자연
송이가 wire 라인 (노랑) 근처에 매달림, Poisson으로 색·톤 자연
Paint by Example (SD v1.4 기반) PoC. 결론: 수확량 예측 paradigm에선 copy-paste가 더 적합.
이유:
- size/품종 통제가 photo-realism보다 결정적
- copy-paste는 GSD 검증 가능 (size 우리가 알고 있음)
- detection 학습엔 다양성이 photo-realism보다 critical
- Diffusion은 demo / Phase 3 production polish 단계에
+0.005 짜내는 것보다 segmentation·면적·무게 회귀 axis 진입이 본질에 가까움.
- YOLO ⭐ drone top-down (specialized)
- SAM3 ⭐ ground-level 측면 (web 학습 분포)
- 어느 게 좋냐 X, 어느 시점이냐가 답
단일 NMS로 안 됨. bbox NMS · mask-IoU NMS · clip · pixel-argmax 모두 다른 종류 문제.
AI 깨끗함이 detection 정확도를 inflate. 진짜 production 데이터로 cross-check 필수.
수확량 paradigm엔 copy-paste 적합 (size 통제 + GSD 검증). Diffusion은 demo 단계에.
YOLO/SAM3 false positive (잎/배경)를 색 분포로 reject. 학습 비용 0.
| 항목 | 상태 |
|---|---|
| 무게 회귀 모델 학습 | ❌ 농가 측정 GT 50-100쌍 필요 (Phase 2) |
| Bucket classifier (S/M/L/XL) | scaffold만, GT 도착 후 학습 |
| Berry counting | Phase 1 보류, Phase 2 ablation |
| 단일 시점 occlusion 보정 | 가시 비율 (50-70%) 추정 → ×1.5-2 곱셈 |
| 다른 품종 일반화 | calibration 별도 필요 |
- Detection plateau 인정하고 axis 전환
- 후처리 4단계 누적 — 단일 fix로 안 풀림 인정
- crop variant 도입 — full image SAM3 leak trade-off 받아들임
- 3 variant 비교 — 한 모델에 매몰되지 않음
- AI + drone 둘 다 검증 — AI만으로 결론 내릴 함정 회피
- Wire detection에 시간 너무 투자 (45% 합격률에서 일찍 학습형 결정)
- SAM3 box format 가정 (실제
[x1,y1,x2,y2]pixel, 디버깅에 시간 소비) - AI 이미지 결과만으로 SAM3 text가 best라고 결론 낼 뻔 — drone에서 정반대
다음에 비슷한 vision pipeline 구축한다면:
- 학습 도메인 = inference 도메인 일치 확인
- 항상 2-3개 variant 비교 (도메인별 winner 다름)
- Foundation model zero-shot baseline 먼저
- Metric plateau에서 axis 전환 가능성 항상 검토
- Synthetic data: copy-paste 먼저, diffusion 나중
- NMS는 단일이 아니라 단계 누적
- Color/HSV 후처리는 final layer
- Hyperparameter sweep + 시각화 grid (한 페이지 비교)