MSP Navigation Messages
This document describes MSP navigation messages, their usage and implementation details. Both INAV and Multiwii implementations (which are largely the same) are documented in this article.
Note that all binary values are little endian (MSP standard).
This document should match the INAV 1.2 (and later) and Multiwii 2.5 flight controller firmware.
Prior to INAV 3.0, the inav-configurator supported a subset of MSP Waypoint (WP) types; for INAV 3.0 it supports all WP types. In addition to the inav configurator, the messages described are implemented in mwp (Linux / FreeBSD / Windows (Cygwin,WSL)), ezgui (Android) mission planners / ground station applications and "drone helper" (Windows 10) mission planner. mwp and ezgui support both INAV and Multiwii; WinGui is a legacy Windows / Multiwii only mission planner that also supports this message set.
Each waypoint has a type and takes a number of parameters, as below. These are used in the MSP_WP message. The final column indicated if the message is implemented for INAV 1.2 (and later).
| Value | Enum | P1 | P2 | P3 | Lat | Lon | Alt | INAV |
|---|---|---|---|---|---|---|---|---|
| 1 | WAYPOINT | Speed (cm/s) [1] (exception [6]) | Altitude Mode & Actions [7] | ✔ | ✔ | ✔ | ✔ | |
| 2 | POSHOLD_UNLIM | ✔ | ✔ | ✔ | ✘ [5] | |||
| 3 | POSHOLD_TIME | Wait time (seconds) | (speed (cm/s)[1]) | Altitude Mode & Actions [7] | ✔ | ✔ | ✔ | ✔ 2.5 and later |
| 4 | RTH [4] | Land if non-zero | ✔ [2] | ✔ | ||||
| 5 | SET_POI [3] | ✔ | ✔ | ✔ 2.6 and later | ||||
| 6 | JUMP | Target WP# | No. of repeats (-1 = forever) | ✔ 2.5 and later | ||||
| 7 | SET_HEAD [3] | Heading (degrees) | ✔ 2.6 and later | |||||
| 8 | LAND | Speed (cm/s) [1] | Elevation Adjustment (m) [8] | Altitude Mode & Actions [7] | ✔ | ✔ | ✔ | ✔ 2.5 and later |
- Leg speed is an INAV extension (for multi-rotors only). It is the speed on the leg terminated by the WP (so the speed for WP2 is used for the leg WP1 -> WP2) (cm/s).
- Not used by INAV
- Once SET_HEAD or SET_POI is invoked, it remains active until cleared by SET_HEAD with a P1 value of -1.
- If a mission contains multiple RTH stanzas, then for Multiwii, the mission terminates at the first RTH. For INAV, prior to c. 2.6, the mission would continue if RTH-LAND is not set, and valid waypoints follow.
- If the final entry in a mission is a WAYPOINT, the INAV treats it as POSHOLD_UNLIM.
- For INAV's "follow-me" mode (WP#255, POSHOLD engaged), P1 may be used to send an orientation heading (0-359 degrees).
- INAV 3.0 and later, P3 defines the altitude mode. 0 (default, legacy) = Relative to Home, 1 = Absolute (AMSL). Ignored for releases prior to 3.0. INAV 6.0 and later additionally define user "Actions" which may be invoked using the logic programming framework.
- INAV 3.0 and later, P2 defines the ground elevation (in metres) for the LAND WP. If the altitude mode is absolute, this is also absolute; for relative altitude, then it is the difference between the assumed home location and the LAND WP. Ignored for releases prior to 3.0.
Since INAV 6.0, the usage of the P3 parameter is:
| Bit | Usage |
|---|---|
| 0 | Relative (not set) or absolute (AMSL) (set) altitude reference |
| 1 | User Action 1 |
| 2 | User Action 2 |
| 3 | User Action 3 |
| 4 | User Action 4 |
| 5-15 | Reserved |
| Field | XML Mission File | MSP_WP binary message |
|---|---|---|
| Latitude, Longitude | Decimal degrees, WGS84 | Integer, WGS84 Degrees * 1E7 |
| Altitude | Integer Metres | Centimetres |
Note that INAV uses the GPS' "above mean sea level" (not "above WGS84 ellipsoid") elevation for navigation. Be aware of this distinction when using absolute rather than relative (to home) mission altitudes.
From INAV 4.0, "FlyBy Home" (FBH) waypoints are supported for WAYPOINT, POSHOLD_TIME and LAND. These WPs are designated by either (or both) of
- The latitude and longitude is zero; or
- The
flagfield is set to 0x48 (72d, 'H')
FBH waypoints have no defined location until the mission is executed, when they assume the location of the arming home location (not affected by safehome). This is ephemeral and is reset on each arming. The location uploaded to the FC is irrelevant where flag == 0x48; in such cases a subsequent download from the FC will return the original WP latitude and longitude, not the home used for a particular instance.
The following example, using the MW XML (INAV configurator, mwp, ez-gui) format, illustrates the WAYPOINT, JUMP, POSHOLD_TIME and LAND types:
<?xml version="1.0" encoding="utf-8"?>
<mission>
<missionitem no="1" action="WAYPOINT" lat="54.353319318038153" lon="-4.5179273723848077" alt="35" parameter1="0" parameter2="0" parameter3="0"></missionitem>
<missionitem no="2" action="WAYPOINT" lat="54.353572350395972" lon="-4.5193913118652516" alt="35" parameter1="0" parameter2="0" parameter3="0"></missionitem>
<missionitem no="3" action="WAYPOINT" lat="54.354454163955907" lon="-4.5196617811150759" alt="50" parameter1="0" parameter2="0" parameter3="0"></missionitem>
<missionitem no="4" action="WAYPOINT" lat="54.354657830207479" lon="-4.5186895986330455" alt="50" parameter1="0" parameter2="0" parameter3="0"></missionitem>
<missionitem no="5" action="JUMP" lat="0" lon="0" alt="0" parameter1="2" parameter2="2" parameter3="0"></missionitem>
<missionitem no="6" action="WAYPOINT" lat="54.354668848061756" lon="-4.5176009696657218" alt="35" parameter1="0" parameter2="0" parameter3="0"></missionitem>
<missionitem no="7" action="WAYPOINT" lat="54.354122567317191" lon="-4.5172673708680122" alt="35" parameter1="0" parameter2="0" parameter3="0"></missionitem>
<missionitem no="8" action="JUMP" lat="0" lon="0" alt="0" parameter1="1" parameter2="1" parameter3="0"></missionitem>
<missionitem no="9" action="POSHOLD_TIME" lat="54.353138333126651" lon="-4.5190405596657968" alt="35" parameter1="45" parameter2="0" parameter3="0"></missionitem>
<missionitem no="10" action="WAYPOINT" lat="54.354847022143616" lon="-4.518210497615712" alt="35" parameter1="0" parameter2="0" parameter3="0"></missionitem>
<missionitem no="11" action="LAND" lat="54.354052100964488" lon="-4.5178091504726012" alt="60" parameter1="0" parameter2="0" parameter3="0"></missionitem>
</mission>
Mission points 5 and 8 are JUMP; they have no location as they affect the current location (the previous WP) and cause an action.
- After WP 4 (JUMP at 5), the vehicle will proceed to WP 2 (
parameter1 = 2); it will do this twice (parameter2 = 2). Then it will proceed to WP 6. - After WP 7 (JUMP at 8), the vehicle will proceed to WP 1 (
parameter1 = 1); it will do this once (parameter2 = 1). Then it will proceed to WP 9. - The second JUMP (8) will cause the first jump (5) to be re-executed.
Mission point 9 is POSHOLD_TIME. The vehicle will loiter for 45 seconds (parameter1 = 45) at the WP9 location. A multi-rotor will hold a steady position, fixed wing will fly in a circle as defined by the CLI parameter nav_fw_loiter_radius.
Mission point 11 is LAND. The vehicle will land (unconditionally, regardless of nav_rth_allow_landing) at the given location. The CLI setting nav_disarm_on_landing is honoured.
There is a video animation of the flight in a short youtube video and a more detailed youtube video tutorial. The mission is executed as:
| WP / next wp | Course | Dist | Total |
|---|---|---|---|
| WP01 - WP02 | 287° | 99m | 99m |
| WP02 - WP03 | 350° | 100m | 198m |
| WP03 - WP04 | 070° | 67m | 265m |
| WP04 (J05) WP02 | 201° | 129m | 394m |
| WP02 - WP03 | 350° | 100m | 494m |
| WP03 - WP04 | 070° | 67m | 561m |
| WP04 (J05) WP02 | 201° | 129m | 690m |
| WP02 - WP03 | 350° | 100m | 789m |
| WP03 - WP04 | 070° | 67m | 856m |
| WP04 - WP06 | 089° | 71m | 927m |
| WP06 - WP07 | 160° | 64m | 991m |
| WP07 (J08) WP01 | 206° | 99m | 1090m |
| WP01 - WP02 | 287° | 99m | 1189m |
| WP02 - WP03 | 350° | 100m | 1288m |
| WP03 - WP04 | 070° | 67m | 1355m |
| WP04 (J05) WP02 | 201° | 129m | 1484m |
| WP02 - WP03 | 350° | 100m | 1584m |
| WP03 - WP04 | 070° | 67m | 1651m |
| WP04 (J05) WP02 | 201° | 129m | 1779m |
| WP02 - WP03 | 350° | 100m | 1879m |
| WP03 - WP04 | 070° | 67m | 1946m |
| WP04 - WP06 | 089° | 71m | 2016m |
| WP06 - WP07 | 160° | 64m | 2081m |
| WP07 - PH09 | 226° | 159m | 2239m |
| PH09 - WP10 | 016° | 197m | 2437m |
| WP10 - WP11 | 164° | 92m | 2529m |
A number of the WP types (JUMP, SET_POI, SET_HEAD, RTH) act as modifiers to the current location (i.e. the previous WP), as follows:
JUMP facilitates adding loop to mission, the first parameter is the WP to jump to, and the second parameter is the number of times the JUMP is executed. A parameter2 value of -1 means JUMP indefinitely (i.e. the pilot must eventually manually abort the mission and take control). For Multiwii, the jump target (parameter 1) must be prior to the jump WP, for INAV, forward and backward jumps are permitted. In general, forward jumps are less useful and will usually need a backward jump to be useful.
INAV validates JUMP WPs prior to arming; the following conditions will cause a "Navigation Unsafe" arming blocker.
- First item can't be JUMP (can't calculate 1st WP distance, impossible for backward jumps)
- Can't jump to immediately adjacent WPs (pointless)
- Can't jump beyond WP list (undefined behaviour)
- Can only jump to geo-referenced WPs (WAYPOINT, POSHOLD_TIME, LAND) (otherwise, undefined behaviour)
In the following example of a forward jump, WP #5 (POSHOLD_TIME) is visited exactly once.
<?xml version="1.0" encoding="utf-8"?>
<mission>
<missionitem no="1" action="WAYPOINT" lat="54.353504451478102" lon="-4.5171693008103739" alt="50" parameter1="0" parameter2="0" parameter3="0"></missionitem>
<missionitem no="2" action="WAYPOINT" lat="54.353290963012334" lon="-4.5186271961455091" alt="50" parameter1="0" parameter2="0" parameter3="0"></missionitem>
<missionitem no="3" action="WAYPOINT" lat="54.354462866400432" lon="-4.519133424449862" alt="50" parameter1="0" parameter2="0" parameter3="0"></missionitem>
<missionitem no="4" action="JUMP" lat="0" lon="0" alt="0" parameter1="6" parameter2="2" parameter3="0"></missionitem>
<missionitem no="5" action="POSHOLD_TIME" lat="54.35511281066394" lon="-4.5180071708842604" alt="50" parameter1="30" parameter2="0" parameter3="0"></missionitem>
<missionitem no="6" action="WAYPOINT" lat="54.354418702382176" lon="-4.5170547858197763" alt="50" parameter1="0" parameter2="0" parameter3="0"></missionitem>
<missionitem no="7" action="JUMP" lat="0" lon="0" alt="0" parameter1="1" parameter2="3" parameter3="0"></missionitem>
<missionitem no="8" action="WAYPOINT" lat="54.353913541022997" lon="-4.5182771029460111" alt="50" parameter1="0" parameter2="0" parameter3="0"></missionitem>
<missionitem no="9" action="RTH" lat="0" lon="0" alt="0" parameter1="0" parameter2="0" parameter3="0"></missionitem>
</mission>
The craft returns to the home location.
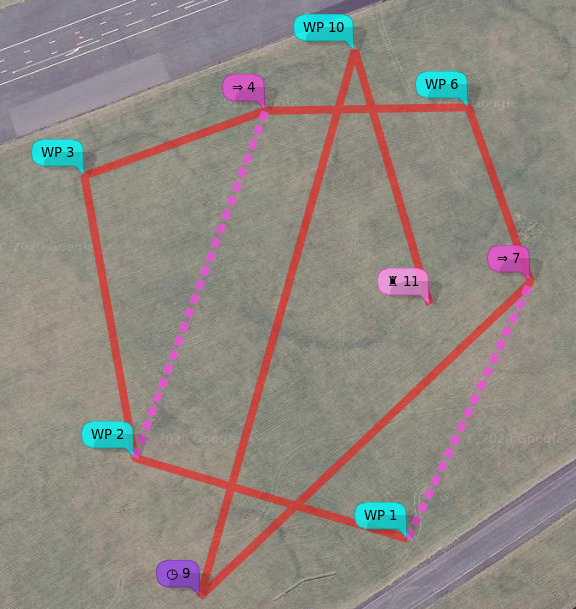
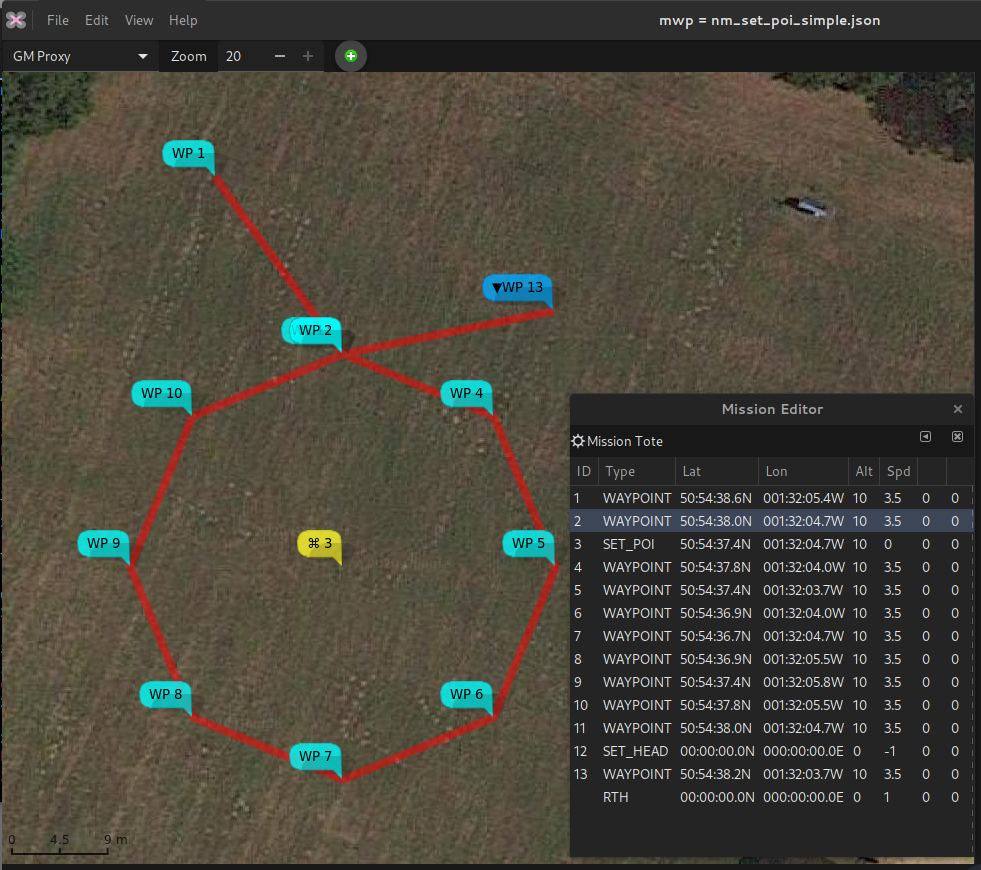
The SET_POI defines a location for a point of interest (POI). The craft will fly the mission (until a SET_HEAD) with the nose pointing at the POI, which might be useful for aerial photography. Note that the craft does NOT fly to the POI.
In the following image:
- WP2 and WP11 are coincident.
- WP3 (yellow icon) defines the POI
- WP12 (
SET_HEAD -1) cancels the POI
So the craft will fly normally from WP1 to WP2. The craft will then fly WP2 - WP11 with the "nose in" towards the POI (WP3).
After WP11, the craft flies normally, "nose first".
Youtube video tutorial on SET_POI and SET_HEAD
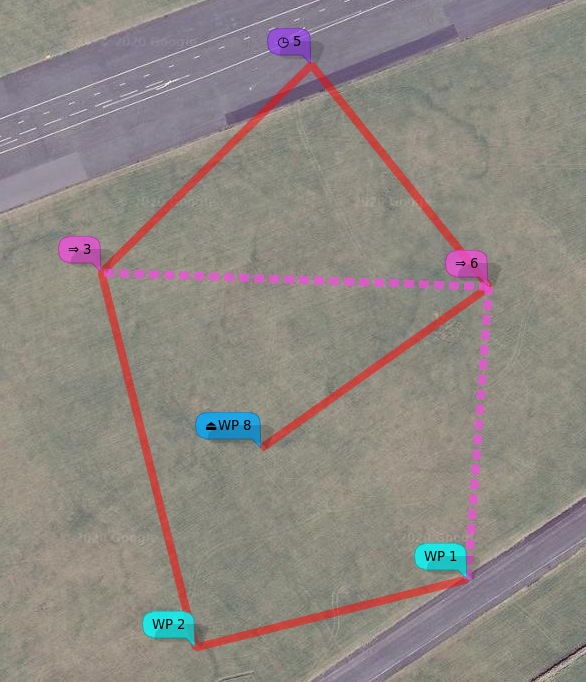
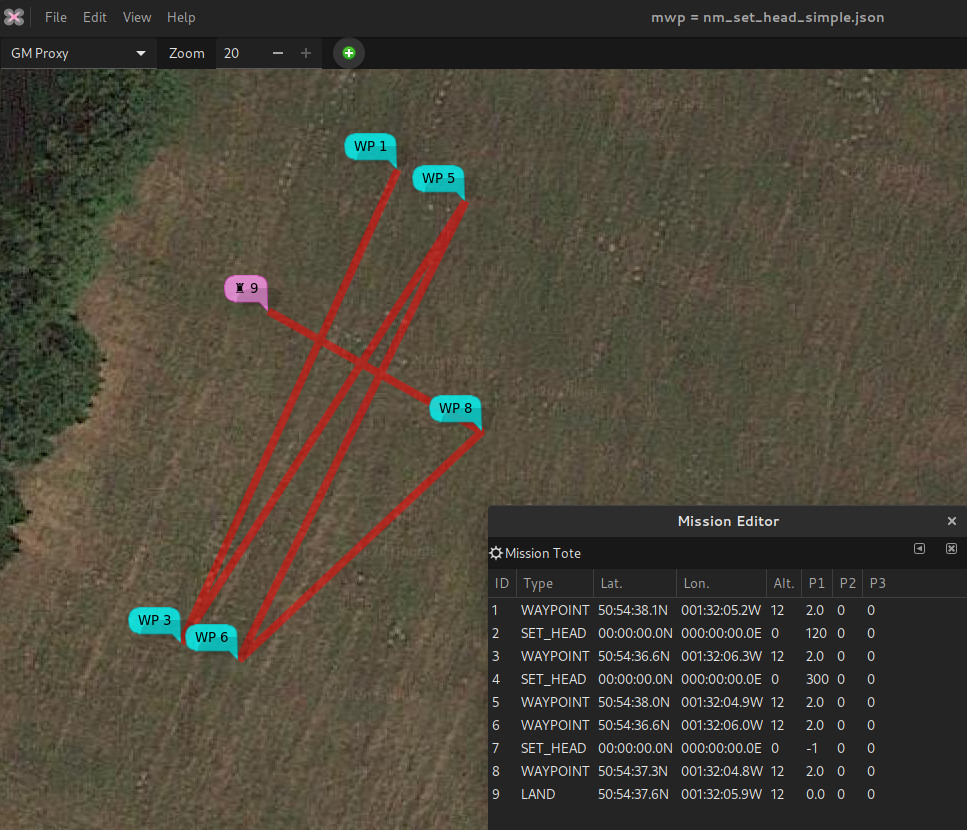
The SET_HEAD type sets the craft's heading (where it 'looks', not the direction of travel). This may be useful for useful for aerial photography. A value of -1 causing the heading to be 'straight ahead', i.e. the direction of travel. Thus, SET_HEAD -1 may used to cancel a previous valid SET_HEAD or SET_POI. A SET_HEAD remains in force until cancelled by SET_HEAD with p1 of -1, or modified by a subsequent SET_HEAD or SET_POI.
In the following example (note that WP8 - WP9 is orientated 120°- 300°):
The craft flies normally (nose first) to WP1.
The craft flies WP1 - WP3 with the nose pointing 120° (i.e. at c. 90° relative to the track)
The craft flies WP3 - WP5 - WP6 with the nose pointing 300° (i.e. at c. 90° / 270° relative to the track).
The craft then files normally (nose first) WP6 - WP8 - WP9 (where it lands). The SET_HEAD with P1 -1 at WP7 cancels the preceding SET_HEAD.
For safety, if no mission is defined, a single RTH action should be sent.
| Enum | P1 | P2 | P3 | Lat | Lon | Alt | Flag |
|---|---|---|---|---|---|---|---|
| RTH | 0 | 0 | 0 | 0 | 0 | 25m [1] | 0xa5 |
- your choice, really.
In general, flag is 0, unless it's the last point in a mission, in which case it is set to 0xa5 (165) (or 0x48 (72) for FBH WP). When waypoints are uploaded, the same data can also be requested from he FC, thus enabling the application to verify that the mission has been uploaded correctly.
| MNEMONIC | Value | Direction (relative to FC) |
|---|---|---|
| MSP_NAV_STATUS | 121 | Out |
| MSP_NAV_CONFIG | 122 | Out |
| MSP_WP | 118 | Out |
| MSP_RADIO | 199 | Out |
| MSP_SET_NAV_CONFIG | 215 | In |
| MSP_SET_HEAD | 211 | In |
| MSP_SET_WP | 209 | In (& out) |
Special waypoints are 0, 254, and 255. #0 returns the RTH (Home) position, #254 returns the current desired position (e.g. target waypoint), #255 returns the current position.
| Name | Type | Usage |
|---|---|---|
| wp_no | uchar | way point number |
| action | uchar | action (wp type / action) |
| lat | int32 | decimal degrees latitude * 10,000,000 |
| lon | int32 | decimal degrees longitude * 10,000,000 |
| altitude | int32 | altitude (metre) * 100 |
| p1 | int16 | varies according to action |
| p2 | int16 | varies according to action |
| p3 | int16 | varies according to action |
| flag | uchar | 0xa5 = last, otherwise set to 0 (or 0x48 (72) for FBH WP, INAV 3.1+) |
The values for the various parameters are given in the section “WayPoint / Action Attributes” Note that altitude is measured from the "home" location, not absolute above mean sea level, unless the absolute altitude flag is set for a WP (INAV 3.0 and later).
When the craft has a valid position, is armed and the mode GCS NAV is asserted, two of the special waypoints may be updated using MSP_SET_WP:
WP#255 may be updated to set the vehicle's desired location (i.e. "Follow Me"); this also requires that NAV POSHOLD mode is asserted. If the altitude is 0, then the vehicle altitude is unchanged, otherwise it is set as desired relative altitude. If 'P1' is in the range 1-359, the heading is also updated, so "nose first follow me" is possible for a multi-rotor.
WP#0 may be updated to set the home position.
The following data are returned by a MSP_NAV_STATUS message. The usage texts are those defined by Wingui; Multiwii and INAV support this message. Almost the same data is returned by the inav LTM NFRAME
| Name | Type | Usage |
|---|---|---|
| gps_mode | uchar | None PosHold RTH Mission |
| nav_state | uchar | None RTH Start RTH Enroute PosHold infinite PosHold timed WP Enroute Process next Jump Start Land Land in Progress Landed Settling before land Start descent Hover above home Emergency Landing |
| action | uchar | (last wp, next wp?) |
| wp_number | uchar | (last wp, next wp?) |
| nav_error | uchar | Navigation system is working Next waypoint distance is more than the safety limit, aborting mission GPS reception is compromised - pausing mission, COPTER IS ADRIFT! Error while reading next waypoint from memory, aborting mission. Mission Finished. Waiting for timed position hold. Invalid Jump target detected, aborting mission. Invalid Mission Step Action code detected, aborting mission. Waiting to reach return to home altitude. GPS fix lost, mission aborted - COPTER IS ADRIFT! Copter is disarmed, navigation engine disabled. Landing is in progress, check attitude if possible. |
| target_bearing | int16 | (presumably to the next WP?) |
The following data are returned from a MSP_NAV_CONFIG message. Values are from Multiwii config.h. Values may also be set by MSP_SET_NAV_CONFIG.
| Name | Type | Usage |
|---|---|---|
| flags1 | uchar |
Bitmap of settings from MW config.h b0 : GPS filtering b1 : GPS Lead b2 : Reset Home b3 : Heading control b4 : Tail first b5 : RTH Head b6 : Slow Nav b7 : RTH Alt |
| flags2 | uchar |
Bitmap of settings from MW config.h b0 : Disable sticks b1 : Baro takeover |
| wp_radius | uint16 | radius around which waypoint is reached (cm) |
| safe_wp_distance | uint16 | Maximum permitted first leg of mission (m, assumed?) |
| nav_max_altitude | uint16 | Maximum altitude for NAV (m) |
| nav_speed_max | uint16 | maximum speed for NAV (cm/sec) |
| nav_speed_min | uint16 | minimum speed for NAV (cm/s) |
| crosstrack_gain | uchar | MW config.h value*100 |
| nav_bank_max | uint16 | maximum bank ??? for NAV, MW config.h value*100 |
| rth_altitude | uint16 | RTH altitude (m) |
| land_speed | uchar | Governs the descent speed during landing. 100 ~= 50 cm/sec unknown units |
| fence | uint16 | Distance beyond which forces RTH (m) |
| max_wp_number | uchar | maximum number of waypoints possible (read only) |
If you have a 3DR radio with the MW/MSP specific firmware, the follow data are sent from the radio, unsolicited.
| Name | Type | Usage |
|---|---|---|
| rxerrors | uint16 | Number of RX errors |
| fixed_errors | uint16 | Number of fixed errors, if error correction is set |
| localrssi | uchar | Local RSSI |
| remrssi | uchar | Remote RSSI |
| txbuf | uchar | Size of TX buffer |
| noise | uchar | Local noise |
| remnoise | uchar | Remote noise |
Note that 32bit flight controllers (baseflight, cleanflight) use capability == 16 for a different purpose (CAP_CHANNEL_FORWARDING). It is advised to use other messages for checking for capabilities on non-MW platforms.
| Capability | Value |
|---|---|
| BIND | 1 |
| DYNBAL | 4 |
| FLAP | 8 |
| NAV | 16 |
The MSP NAV message set is implemented by mwptools (Linux, Windows, FreeBSD), ezgui / mission planner for INAV (Android), WinGUI (MS Windows) and the inav-configurator.
inav-configurator, mwptools, ezgui / mp4i (and WinGUI) share a common, interoperable, XML mission file format. A XSD can be found in the inav developer documenation.
In order to send waypoints to the flight controller, they need to be serialised into an MSP_SET_WP message. This is a standard MSP message; it may be encoded as either MSPv1 or MSPv2. In general, you should use MSPv2 unless you're targeting MultiWii or ancient versions of INAV.
The payload comprises the following packed 'C' language structure:
struct __attribute__ ((__packed__)) _msp_wp {
uint8_t wp_no;
uint8_t action;
int32_t lat;
int32_t lon;
int32_t altitude;
int16_t p1;
int16_t p2;
int16_t p3;
uint8_t flag;
};
typedef struct _msp_wp MSP_WP;
All values are little endian; of particular note:
- MSP_SET_WP has value
209(decimal). -
lat,lon(latitude and longitude). These values are the WGS84 floating point values multiplied by1e7(10,000,000). So the point54.137110 -4.719426(54:08:13.60N 004:43:09.93W) would be encoded as541371100 -47194260. -
altitude. In centimetres. -
action,p1,p2andp3are encoding according to the values in sections WayPoint and Action Attributes and P3 bitfield usage. -
flagvalues are0(default),72Fly by home WP,165final WP.
Depending on your preference and programming language features, you can either write the (little endian) values directly into a packed structure, or individually serialise each element into a contiguous byte array (21 bytes total). In the latter case, the lat value would occupy byte offsets 2-5.
So for the simple mission (one geographic WP and RTH)
<?xml version="1.0" encoding="UTF-8"?>
<mission>
<missionitem no="1" action="WAYPOINT" lat="54.13711" lon="-4.719426" alt="42" parameter1="1200" parameter2="0" parameter3="0"></missionitem>
<missionitem no="2" action="RTH" lat="0" lon="0" alt="0" parameter1="1" parameter2="0" parameter3="0" flag="165"></missionitem>
</mission>
The WP1 payload comprises the following 21 bytes (as hexadecimal):
01 01 dc aa 44 20 6c df 2f fd 68 10 00 00 b0 04 00 00 00 00 00
Which encodes to the MSPV2 message:
24 58 3c 00 d1 00 15 00 01 01 dc aa 44 20 6c df 2f fd 68 10 00 00 b0 04 00 00 00 00 00 9a
The WP2 payload comprises the following 21 bytes (as hexadecimal):
02 04 00 00 00 00 00 00 00 00 00 00 00 00 01 00 00 00 00 00 a5
Which encodes to the MSPV2 message:
24 58 3c 00 d1 00 15 00 02 04 00 00 00 00 00 00 00 00 00 00 00 00 01 00 00 00 00 00 a5 a3
The normative reference is the source code, the following are definitive src/main/msp/msp and src/main/fc/fc_msp.c.