WM320 Gimbal driver pitch
Function
Variants
Parts
Programming
External interfaces
Service interfaces
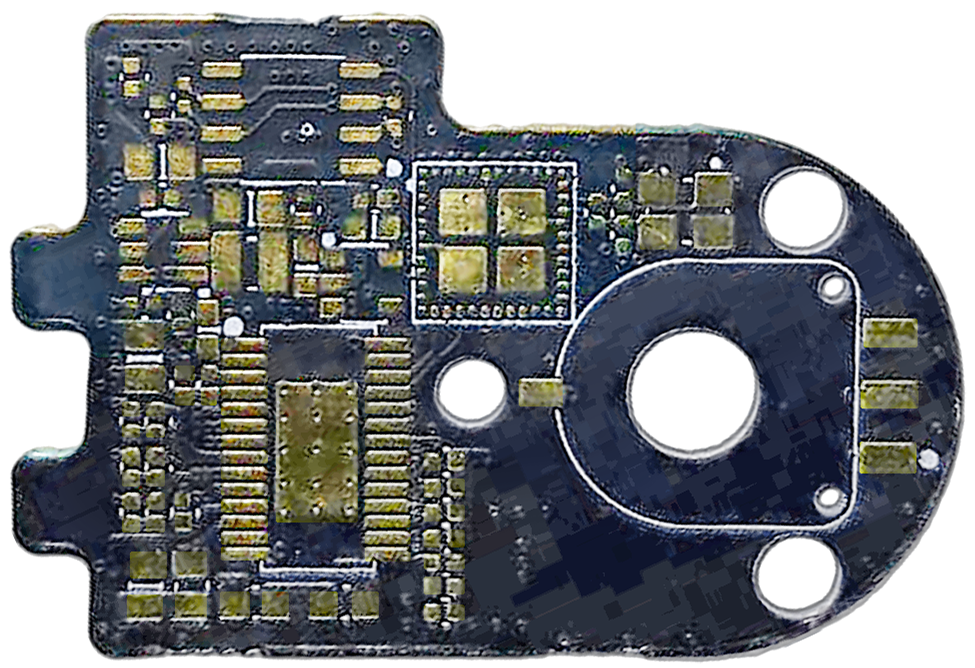
Board view
Schematics
The Gimbal Driver Pitch board contains ICs to drive the Pitch Motor.
Boards for P3X start from V3. Each pitch board variant has a corresponding roll board variant.
| Marking | Overview |
|---|---|
| Driver Pitch V3 | Phantom 3 Pro/Adv early |
| Driver Pitch V4 | Phantom 3 Pro/Adv update 1 |
| P00954.05 | Phantom 3 Pro/Adv update 2 |
| Marking | Amt. | Pkg. | Function | Specification |
|---|---|---|---|---|
| HV232Q 4CM ACVS G4 | 1 | 3.3V CAN transceiver | datasheet | |
| MPFA 3806 967 M | 1 | |||
| ADEF 329 | 3 | MP1907GQ QFN10; 100V, 2.5A, High Frequency Half-bridge Gate Driver | description | |
| 7804 | 3 | AON7804 30V Dual N-Channel MOSFET | datasheet | |
| DSPIC33 EP128 MC504 ? | 1 | digital signal controller; 70 MIPS core with integrated DSP and enhanced on-chip peripherals; motor control MCU | description | |
| T120 | 1 | Quartz oscillator, 12 MHz | ||
| pot-3 | 1 | RDC506002A potentiometer; resistance 6 - 10 kOhm; used for sensing arm position | description datasheet |
| Marking | Amt. | Pkg. | Function | Specification |
|---|---|---|---|---|
| HV232Q 4CM | 1 | 3.3V CAN transceiver | datasheet | |
| DRV8313 571C AQKP | 1 | 2.5A Three Phase Brushless DC Motor Driver (PWM Ctrl) | description | |
| T120 | 1 | Quartz oscillator, 12 MHz | ||
| pot-3 | 1 | RDC506002A potentiometer; resistance 6 - 10 kOhm; used for sensing arm position | description datasheet |
| Chips | Firmware | Description |
|---|---|---|
| DSPIC33 | gimbal arm Firmware | Gimbal pitch control; reads pitch arm position potentiometer and supplies control signal to the motor driver circuit. Pre-programmed and not included in firmware updates. |
There are two connectors on the board:
| Marking | Overview |
|---|---|
| 14-pin FFC con. | Flex flat cable connector |
| 10-pin FFC con. | Flex flat cable connector |
The service pads marking and placement is identical to the Gimbal driver roll board.
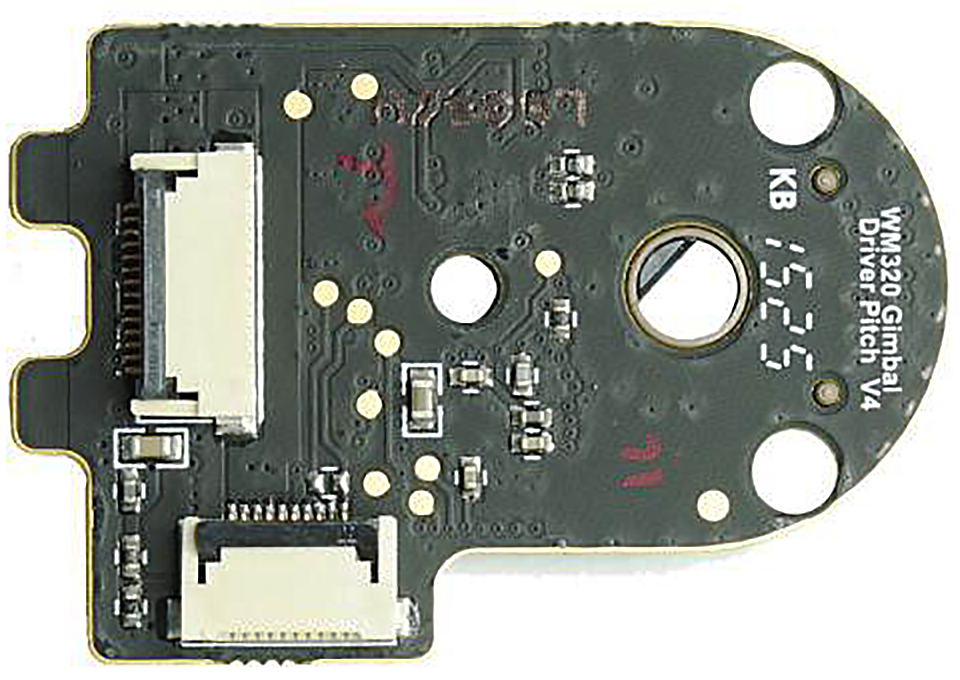
Top of a Driver Pitch V4 board:
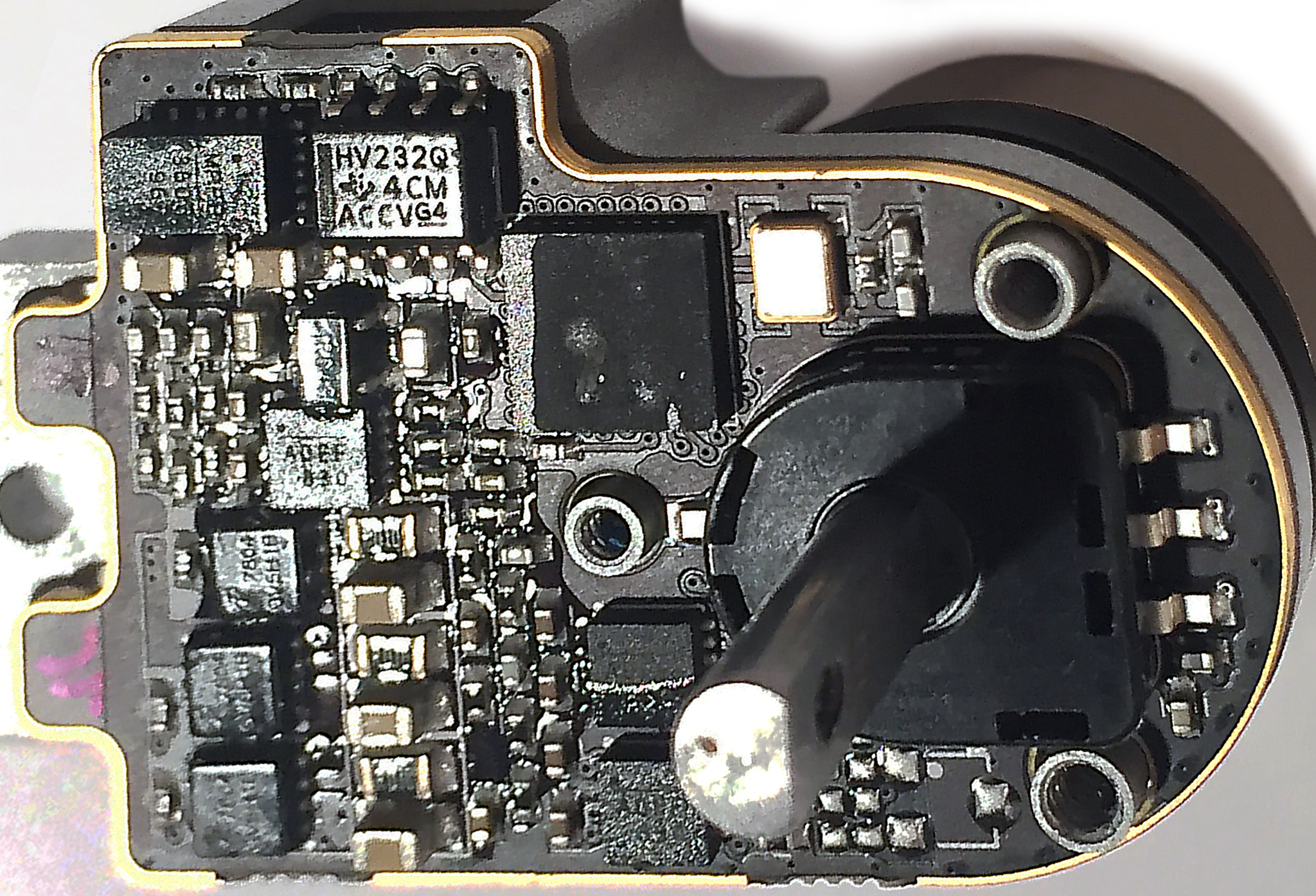
Bottom of the Driver Pitch V4 board:

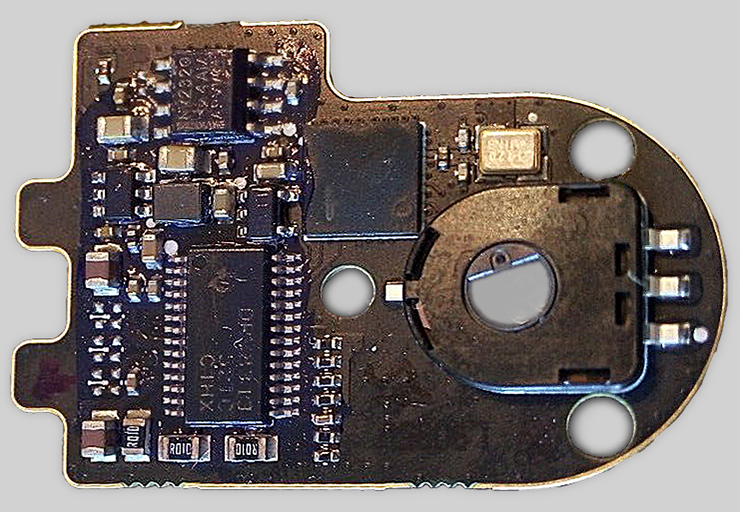
Bottom of another Driver Pitch V4 board:
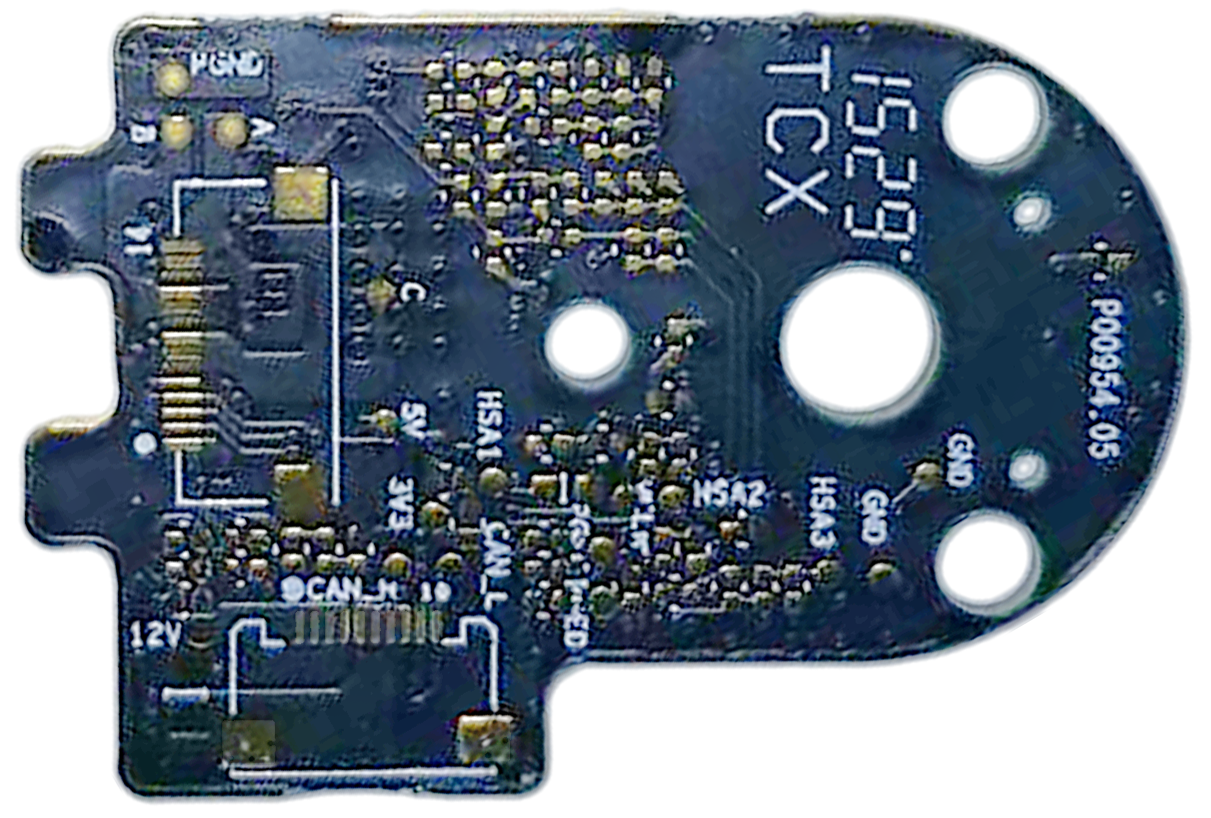
Bottom of a P00954.05 board:
View on the P00954.05 clean PCB (without components):
flowchart LR
Gimbal-FFC-cable((FFC))-- CAN<br/>bus ---GDP-CAN-tx/rx[CAN<br/>tx/rx]
subgraph Gimbal driver pitch
GDP-CAN-tx/rx[CAN<br/>tx/rx]---GDP-uC[uC<br/>DSPIC33]
GDP-Xlat(quartz<br/>oscillator)---GDP-uC
subgraph BLDC IC / MOSFETs
GDP-motor-mosfet-pair-a(2x<br/>n-MOS)
GDP-motor-mosfet-pair-b(2x<br/>n-MOS)
GDP-motor-mosfet-pair-c(2x<br/>n-MOS)
GDP-half-bridge-driver-a[half-bridge<br/>driver]
GDP-half-bridge-driver-b[half-bridge<br/>driver]
GDP-half-bridge-driver-c[half-bridge<br/>driver]
GDP-half-bridge-driver-a---GDP-motor-mosfet-pair-a
GDP-half-bridge-driver-b---GDP-motor-mosfet-pair-b
GDP-half-bridge-driver-c---GDP-motor-mosfet-pair-c
end
GDP-uC---GDP-half-bridge-driver-a
GDP-uC---GDP-half-bridge-driver-b
GDP-uC---GDP-half-bridge-driver-c
GDP-uC---GDP-potentiometer
GDP-potentiometer(potentiometer)
end
GDP-brushless-motor((pitch<br/>brushless<br/>motor))
GDP-potentiometer-. shaft<br/>position .-GDP-brushless-motor
GDP-motor-mosfet-pair-a---GDP-brushless-motor
GDP-motor-mosfet-pair-b---GDP-brushless-motor
GDP-motor-mosfet-pair-c---GDP-brushless-motor
The driver receives commands in form of CAN packets, and sends back momentary position and status. The packets are composed by the small micro-controller, which drives gates on pairs of MOS transistors providing proper phases for the motor. The MOS transistors can be either discrete parts with separate half-bridge drivers, or closed within one dedicated chip - depending on version of the board. The micro-controller also receives feedback by reading a potentiometer which is attached to shaft of the motor.
The following schematics were made by enthusiasts: