WM160 GPS and IMU board
Function
Variants
Parts
Programming
External interfaces
Service interfaces
Board view
Schematics
The GPS module provides the Flight Controller with current GNSS coordinates, while IMU and barometer are used to measure movement in space and height above starting point.
The GPS Patch Antenna usually has factory cut-ins to improve impedance match. One corner of the antenna is also cut, to widen bandwidth. The antenna is excited through a coaxial line, from other side of the board.
The IMU chip is protected by silicone coating; this also eliminates any self-vibrations making the readings more stable.
The barometer chip is covered by a sponge which acts as a filter, removing sudden spikes in pressure readings.
There are multiple versions of the board:
| Marking | Overview |
|---|---|
| PP001325.05 | First known version. |
| Marking | Amt. | Pkg. | Function | Specification |
|---|---|---|---|---|
| u-blox M8030-KT 83000A 05761033 1925A3 | 1 | |||
| NAP2002 X61926f | 1 | Quartz oscillator | ||
| ?.ZQ | 1 | |||
| In Yg | 1 | |||
| ANT | 1 | Ceramic patch antenna for GNSS band |
The u-blox modules are programmable, but there is no capability of updating GPS firmware via drone firmware package.
| Chips | Firmware | Description |
|---|---|---|
| TODO | The software computes and sends GNSS coordinates according to configuration; module allows programming via serial interface. |
Connector on the board is:
| Marking | Overview |
|---|---|
| TODO |
The following service pads exist on this board:
| Marking | Overview |
|---|---|
| TODO |
Top of a PP001325.05 board with IMU chip visible:

Top of another PP001325.05 board:

Bottom of the PP001325.05 board:

Top of a clean PCB from PP001325.0X board:

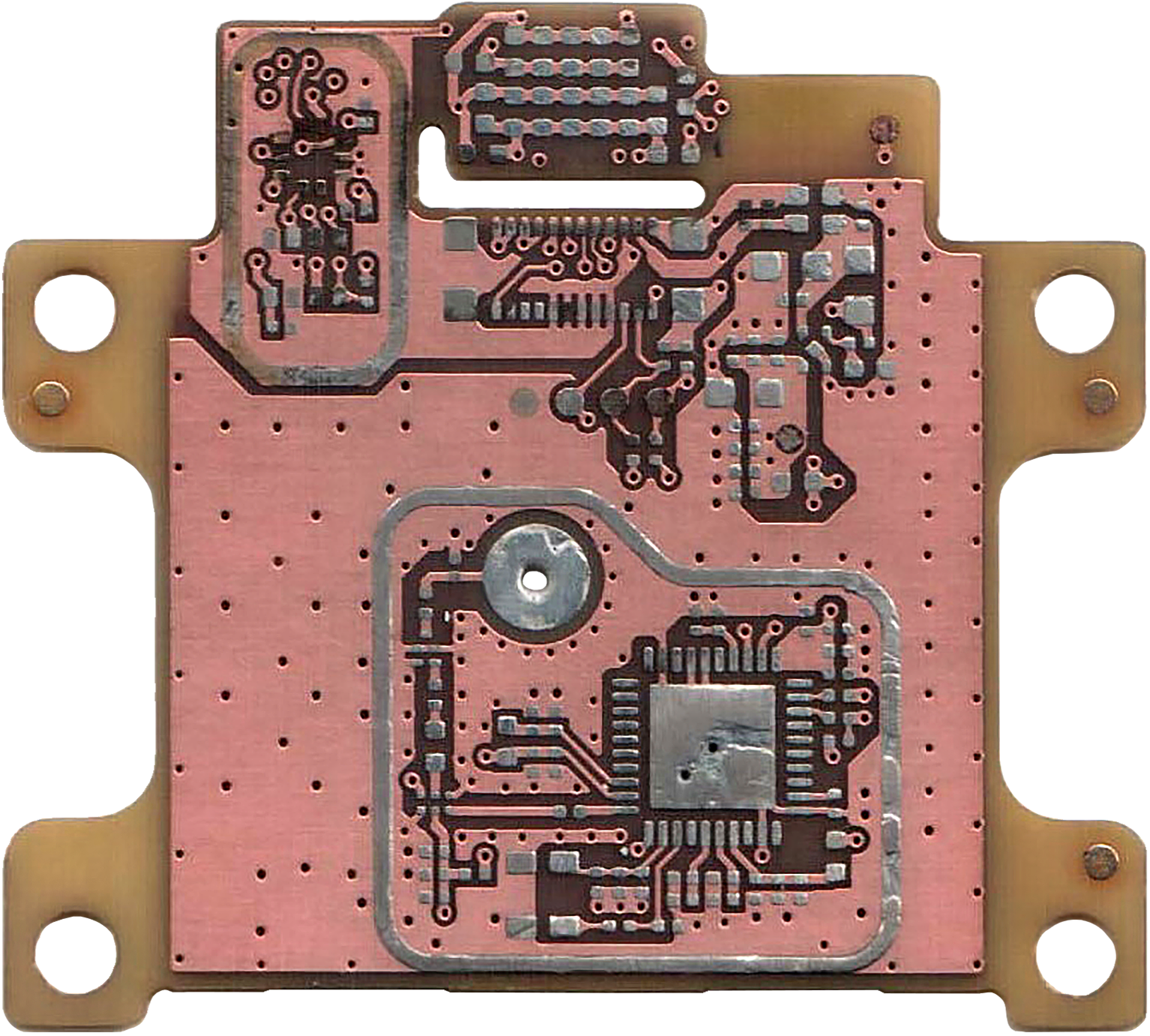
Bottom of the clean PCB from PP001325.0X board:
No schematics available.