WM330 Gimbal Master Control board
Function
Variants
Parts
Programming
External interfaces
Service interfaces
Board view
Schematics
Contains gimbal Main Controller Unit which sends commands to all arm motors and controls gimbal status. Also includes Inertial Measurement Unit which the MCU micro-controller uses to track camera position.
The known variants are listed below.
| Marking | Overview |
|---|---|
| P01365.6 | First version. |
| P01365.10 |
| Marking | Amt. | Pkg. | Function | Specification |
|---|---|---|---|---|
| MP66 | 1 | Inertial Measurement Unit | ||
| STM32F303 | 1 | Gimbal MCU |
| Chips | Firmware | Description |
|---|---|---|
| STM32F303 | m0400 | Gimbal master control; provides gimbal arm microcontrollers with proper signals to ensure stabilization and responsiveness to user commands. |
The board contains three connectors:
| Marking | Overview |
|---|---|
| TODO |
The following service pads exist on this board:
| Marking | Overview |
|---|---|
| TODO |
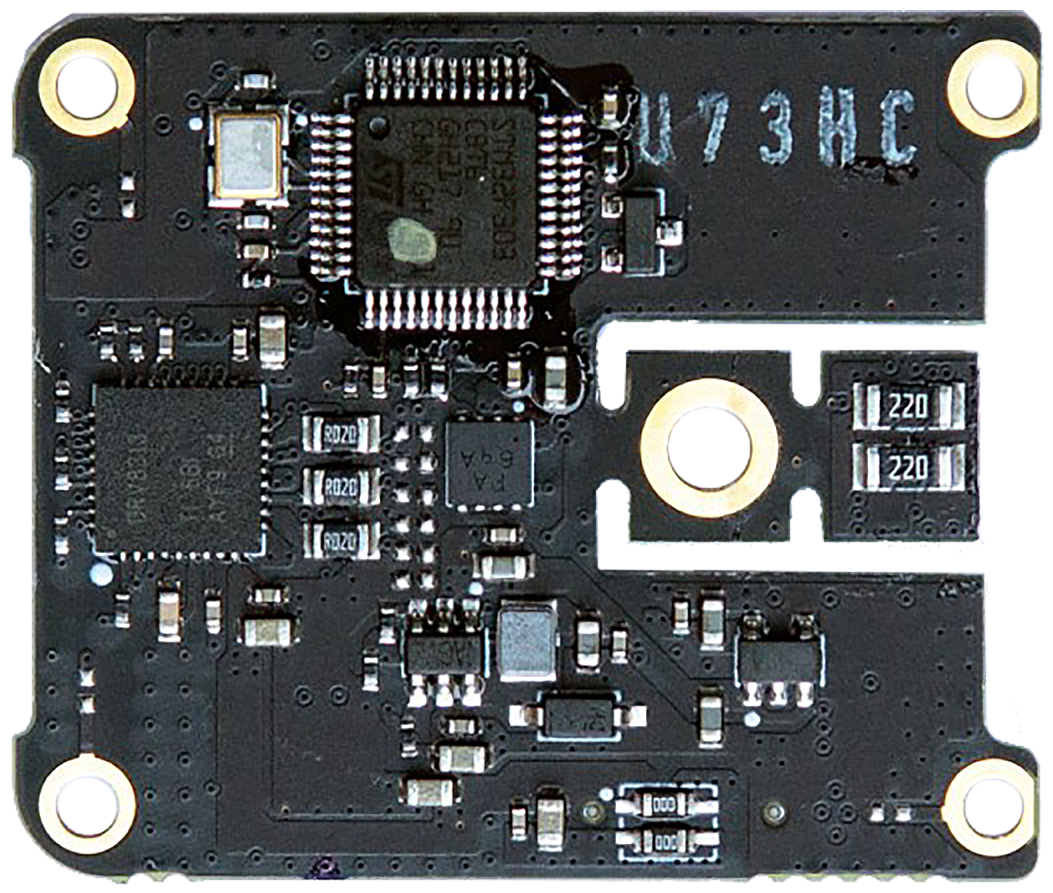
Top of a P01365.6 board:

Bottom of the P01365.6 board:

Top of a P01365.10 board:

Bottom of the P01365.10 board:
No schematics available.