5.1 AccelerationDecision
Considering the above framework, 10 different acceleration regimes (functions) are defined in SimMobility ST, and used in function makeAcceleratingDecision that outputs the smallest one. In MITSIM, this acceleration decision is represented by the function TS_Vehicle::makeAcceleratingDecision.
Each of these accelerations is calculated using a specific function and data and detailed in the next sub-sections.
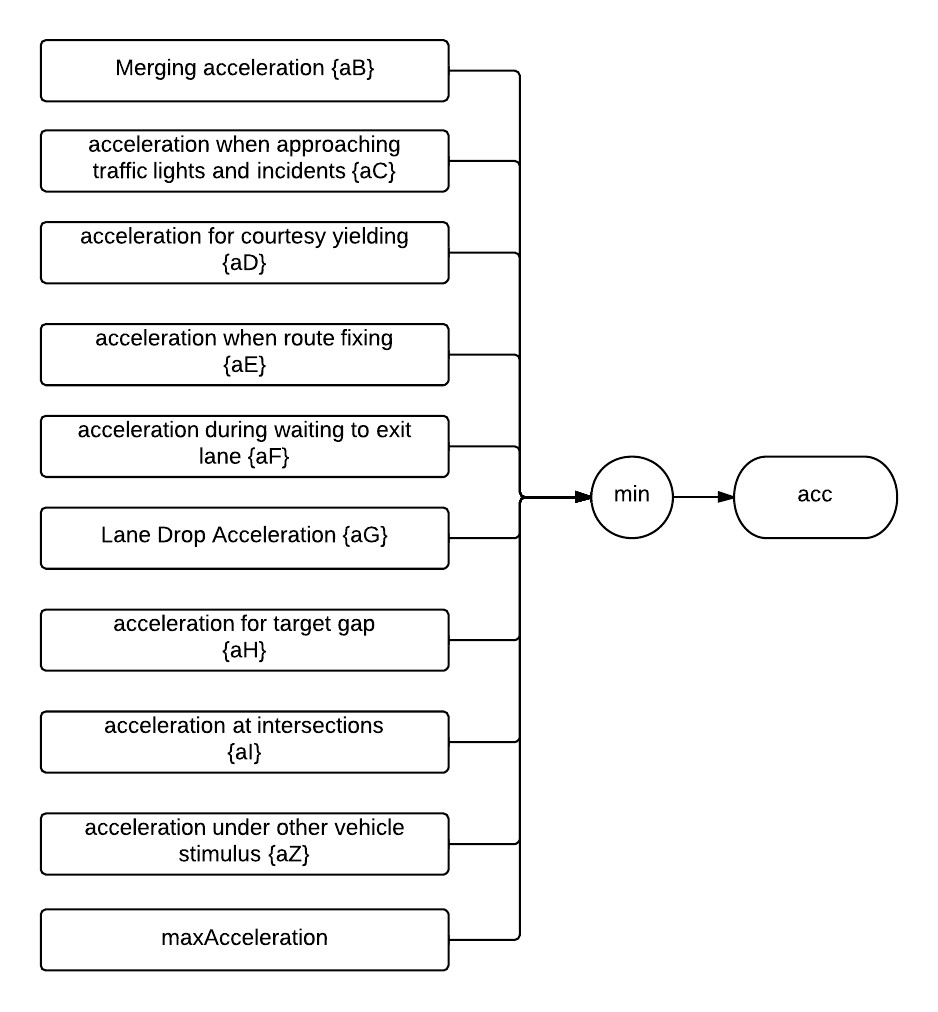
Flow chart for makeAcceleratingDecision
Finally, after the selection of the acceleration to implement, a variable status is update with the state of the acceleration regime for debugging and visualization purposes. This variable is described in more detail in Section 6.1 and can include one of the following acceleration regimes (besides other behavioral regimes):
-
STATUS_REGIME_MAXACC; -
STATUS_REGIME_MERGEACC; -
STATUS_REGIME_EVENTACC; -
STATUS_REGIME_YIELDACC; -
STATUS_REGIME_ROUTEACC; -
STATUS_REGIME_WAITACC; -
STATUS_REGIME_LDROPACC; -
STATUS_REGIME_TGAPACC; STATUS_REGIME_INTERACC;STATUS_REGIME_FFACC;STATUS_REGIME_CFACC;-
STATUS_REGIME_EMRGNACC;
The last 3 regimes are updated within auxiliary functions that are used within the main makeAcceleratingDecision function for the acceleration under other vehicle stimulus.