9.3 ParkingDrivingBehavior
** PLEASE CHECK MID-TERM PARKING IMPLEMENTATION. THIS DRAFT IMPLEMENTATION IS NOT YET IN THE CODE. **
As detailed in MT, the access to parking phase has a series of steps, which depend on the vehicle type and desired parking type. Vehicle behavior is proposed to be dependent on the distance to the intended parking location and on the type of parking the driver is aiming to park on. The full scope of this concept is presented in the MT chapter. Here in ST, only the relation between the distances and speed profiles are discussed. Following table summarizes the distance variable for parking supply and conditional flagged states.
| Name | Description |
|---|---|
| Ddes ”>” Dmax | Normal state, i.e. “Car following” behavior. |
| Dmax ”>” Ddes”>” Dpk | Speed profile: AssessPkAvailability. Note that this state is conditional on the driver’s willingness to look for parking in the way to his destination. It might involve a reduction in speed. |
| Dpk ”>” Ddes | Speed profile: “ApproachPkLocation” Note that this state is conditional on the driver’s willingness to look for parking in the way to a facility/slot or to the driver being in a cruising state, which is only applicable to searching for parking in a segment or zone (group of segments). It might involve a further reduction in speed. |
| Dslot ”>” Ddes | State: “ApproachPkSlot”. |
| WaitingToPk | At the slot/hub entry, when queueing, in which the vehicle movement alternates between advancing the vehicle to the next slot in the queue or having the vehicle in a static position. |
| Pk | At the slot/hub/road, while the vehicle is static for the duration of its total dwell time (e.g. comprised by activity time plus time to reach destination walking). A distinction is made between double parking on the road and “normal” parking events since double parking events will not be associated with an infrastructure (slot/hub) ID. |
| EscapePkSlot | At the slot/hub entry, after the dwelling time while the driver moves the vehicle back to the road network to proceed to the next stop. |
Detailed descriptions on access and egress behavior are illustrated in following sub-sections:
- Vehicle access to parking – Access to parking
- Vehicle access to parking – Cruising
- Vehicle access to parking – Waiting (i.e. queuing)
- Vehicle access to parking – Double parking
- Vehicle egress from parking
Between Dmax and Dpk, when applicable, the driver changes his behavior from accOfFreeFlowing (>100m to lead vehicle) or “Car Following” (aCF) to take the minimum of the three:
- acceleration rate of free flow (accOfFreeFlowingMax),
- speed within a normal distribution between 20 and 25km/h,
- speed of the leader (only when headway less than threshold). Entering the boundary of Dpk, when applicable, the state is set to “ApproachPkLocation”. The driver might change from the previously defined speed profile to take the minimum of the three:
- acceleration rate (accOfFreeFlowingPk),
- speed within a normal distribution between 9 and 12 km/h,
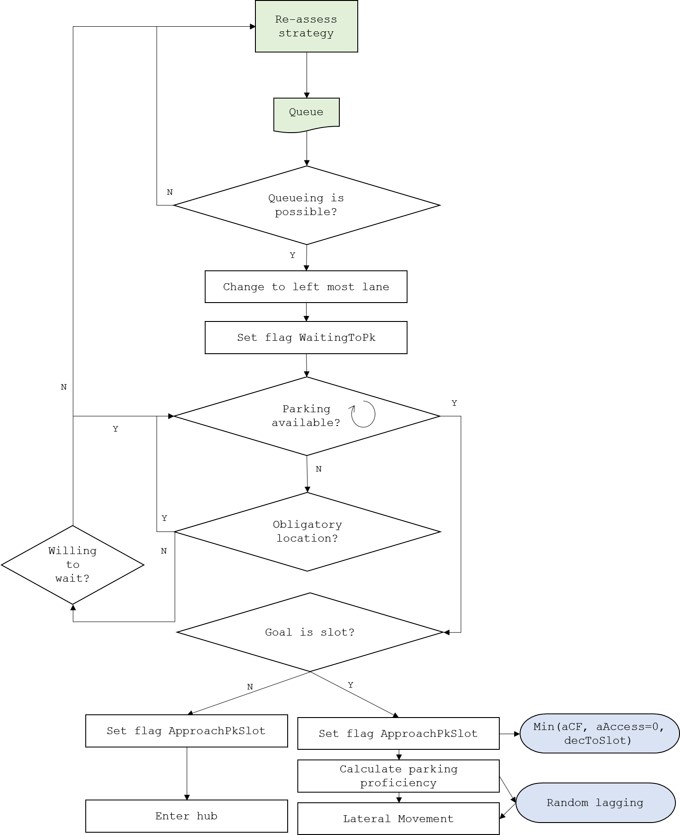
- speed of the leader (only when headway less than threshold). At any point, we assume drivers can identify parking slots considering a defined visibility distance (to be specified). Once a parking slot is chosen, the vehicle drives towards to the target slot with predetermined acceleration. Upon reaching Dslot, the flagged state changes from ApproachPkLocation to ApproachPkSlot. Under ApproachPkSlot, the vehicle mandatorily changes to left most lane and start deceleration with (Min(aCF, aAccess=0, decToSlot)). The deceleration rate (decToSlot) uses the breakToStop sub-function and is defined as:

In which, a=dt^2; b=2V-dec_norma; c=V^2+2dec_norm(dis-V*dt); and
- V: Speed;
- Dt: Simulation time step;
- Dis: distance to slot;
- dec_norm: XML parameter.
If the goal parking location is available, the vehicle movements differs for slots and hubs. For a slot the driver executes a lateral movement from his leftmost lane to the slot directly, after some lagging time which determined by some of the drivers’ attributes (e.g., driving experience, gender, etc.) and vehicle characteristics (e.g., length) relative to the slot size / slot availability in adjacent slots, which might influence the difficulty of the maneuver. These specifications are to be further detailed in the future. For a hub, the vehicle is simply moved into the hub. Details on how drivers deal with unavailable parking locations are provided in the parking framework documentation. Following figure provides a flowchart detailing the connection between the above-mentioned elements.

Access behavior
In general, the Smart Mobility Controller will direct vehicles to a designated stand location. Other events (such as Self direct to Taxi stand) can be described with same logic as above.
Public buses reject all but Trigger 3, in which the availability condition serves the purpose of triggering the queuing mode (WaitingToPk) when the bus stop is not free.
Cruising behavior is conditional on the ‘Cruising’ mode being chosen by the driver, i.e. an output of the within-day demand models. Cruising is defined as looking for parking while driving within the range of desired walking distance to the main destination, meaning that driving between parking facilities while not looking for parking is not cruising. As such, it can be assumed that, since cruising takes place within the drivers’ Dpk range, the speed profile is as defined for “ApproachPkLocation” followed by ApproachPkSlot when an available slot is found or the driver is to queue for a slot. It can be allowed for the range to change (decrease or increase up to Dmax).
Refer to the Taxi Roaming Model Implementation Document.
Public buses don’t cruise.
To wait near parking location to be available, the vehicle is required to check availability on the adjacent segments (prev-pSegment or sSegment). prev-pSegment should not restrict the spillover length unless it leads to an intersection. Note that vehicles are only allowed to wait inside of left most lane of prev-pSegment (or sSegment). If available (Set flag WaitingToPk), vehicle changes his lane and waits before the last vehicle waiting or the last vehicle parking. Notice that the driver re-assesses his/her strategy if queuing is not possible (e.g. queue reaches an intersection). If the parking location is obligatory, the strategy might involve going around the block to “buy some time”. During the wait, availability condition is checked every 1 sec and drivers might opt-out for this previously chosen strategy if the parking location is not obligatory. Once a slot is available or there is spare capacity in the hub, the driver can move the vehicle to the parking facility. Once parking is possible the driver moves the vehicle into the facility, which might involve some lag in the movement representing the parking movement into a slot.
Taxis waiting to enter a Taxi Stand facility can behave like freight and passenger vehicles queuing for access to a parking facility. However, for more details check the Taxi Roaming Model Implementation Document.
Public buses are not considered to have any opt-out choice, whether arriving at their terminal or waiting to reach an assigned bus stop and pickup/drop-off passengers. ‘WaitingToPk takes place only if the bay is occupied.
Waiting behavior
Assumptions:
- Double parking is an attribute of the road segment (i.e., if possible or not), although this might or not be known to the driver depending if the destination is or not a frequent location.
- Double parking is either fully or not possible for each segment and defined by a binary attribute (InLanePk).
- When the destination is a frequent location, and the driver opts (to attempt) double-parking, the vehicle will be moved to the closet road segment to the destination where double parking is possible and then to the nearest point to this destination. If there is no segment within Dpk, the driver should re-assess his/her parking strategy.
- Double parking in bSegment and sSegment is prohibited to protect in/outgoing and waiting vehicles for parking; it can also be prohibited in narrow one-way one-lane roads to avoid extensive blockages).
- When destination is not a frequent location, the driver takes the vehicle to the segment where the access to the destination is specified. Once arriving at that segment the driver checks for the possibility of double parking.
Once the driver reaches the segment to double park at a distance equal his/her visibility distance the driver starts checking for other double parked vehicles close to the target double parking location. If there are any, this implies the need for a dynamic assignment of the stopping point depending on double parked vehicles ahead. This assignment is subject to:
- New assignment does not lie outside threshold of a defined walking distance.
- New stop assignment is reachable from current route.
If there is no room in the lane to double park, or the vehicle movement was not successful, the demand model should re-assess this choice allowing for re-visiting after going around the block or make the driver re-assess his/her parking strategy.
Due to the “short” time that it takes to pickup/drop-off passengers, it could be assumed that Taxi/MOD vehicles can double park in any segment. The dynamic assignment of the stopping point still applies. Refer to the Taxi Roaming Model Implementation Document to check for the latest proposal.
Public buses are assumed to double park when the route has assigned in-lane bus stops. However, in this situation the dynamic assignment of the stopping point does not apply, as it is assumed that the bus needs to reach the stop to pickup/drop-off passengers. However, the bus should be prevented from stopping at an intersection, potentially stopping in the previous segment to the one where queuing will take place in the future.

Double parking behavior
Vehicles egress from the assigned parking location after the predicted, which should be composed by activity time plus access time to the destination: Dwell time = Activity duration + Walking time The driver checks the status of mainline lane, through lead/lag gaps (i.e., headway between lead vehicle and following vehicle on target lane) on target lane at the point of egress (Egr. Point). After checking nosing feasibility, the driver makes the vehicle change lane. After removing vehicle from parking slot, the occupancy a slot returns to zero or the capacity usage of a hub is decreased by 1.

Egress behavior from parking