MicroscopicTrafficSimulator
The structure of the Microscopic Traffic Simulator is detailed in figure below. The virtual world is populated during the initialization phase, after which the simulation receives the control information/action plan at every time-step. Two kinds of behaviours are simulated: high level (travel) decisions, such as route choices, are taken at some decision point (e.g., a bus stop). Lower level or movement decisions, such as car following and lane-changing, occur while the agent is in movement. While the agent's position is updated at every time-step, the movement-related decisions only takes place when specific events occur.
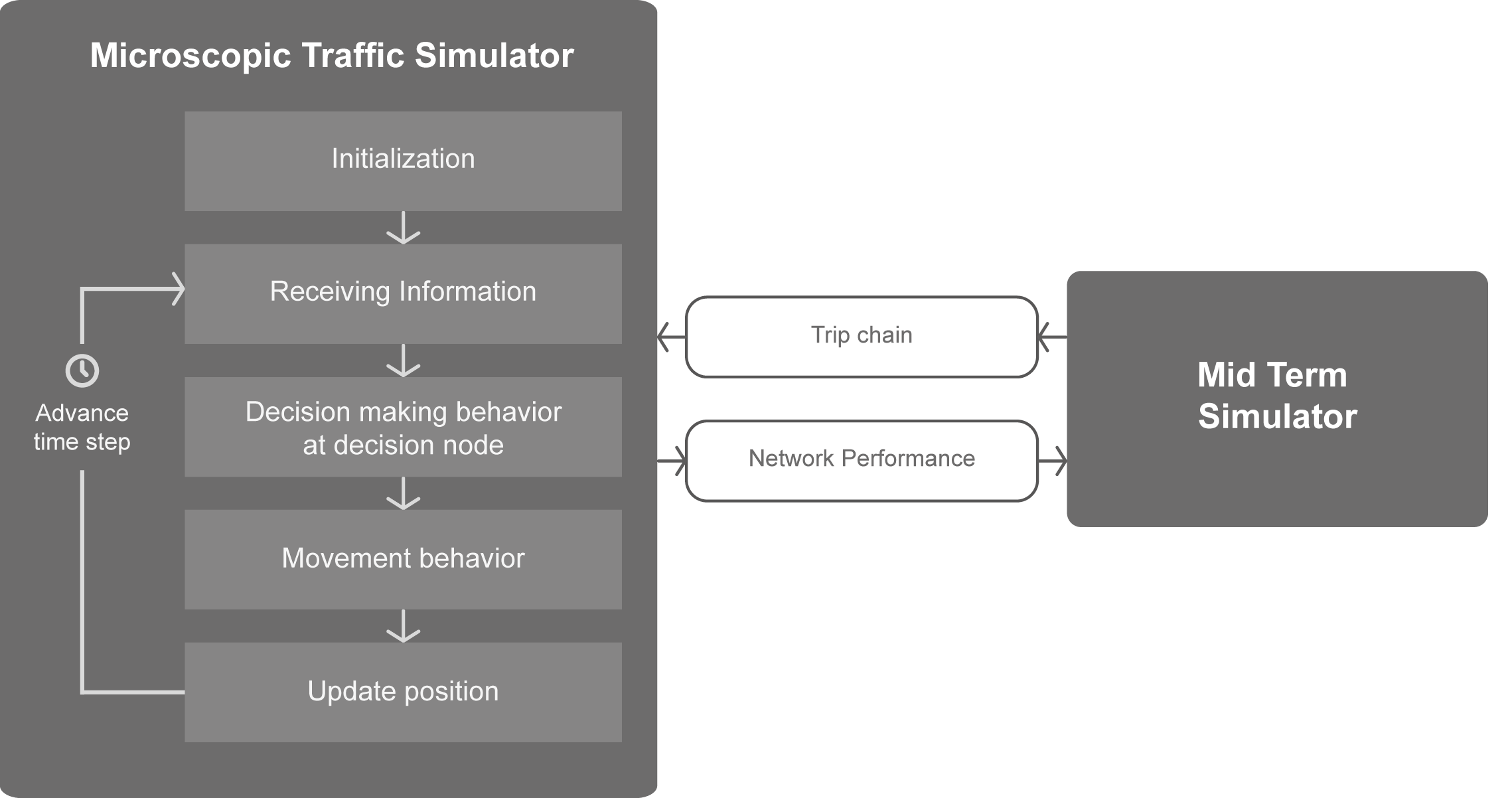
A high-level flowchart of the simulation loop within the microscopic traffic simulator is shown below.

Instead of the traditional Origin-Destination matrix definition used in the demand formulation of traffic microscopic simulation models, SimMobility ST (and its higher level counterparts) uses an activity based demand formulation in the form of activity-schedules. In such approach, trip chains are generated by individual daily schedules instead of aggregated traffic specific matrices. Such data can be obtained directly using mobility and goods survey data or using a pre-day simulator, such as the one integrated in the SimMobility MT framework. This model consists of an activity-based modelling system formulated as interconnected discrete choice models representing choices at distinct dimensions. This pre-day model development follows the Day Activity Schedule approach which focuses decisions related to daily activity and mobility. There are three different hierarchies in the system: day pattern level, tour level and intermediate stop level. Each level consists of several models. The overall system can be viewed as a hierarchical (or nested) series of choice models.
Therefore, within the SimMobility ST, agents are moved as per the planned trip chain but can be changed during the simulation if specific circumstances such as high congestion, incidents, public transportation interruptions or any control or information provision are observed.
For each agent generated in the simulation its role is generated (pedestrian, passenger and driver) and its role-specific characteristics are generated (e.g., aggressiveness, planning capability, look-ahead distance, reaction times, etc). For vehicle-based trip, an individual vehicle is generated. On-going work is being carried out to allow vehicle ownership and parking models to integrate a consistent vehicle generation model. The generated vehicles are then assigned vehicle attributes (e.g., type and the impact of grade on these capabilities) based on pre-determined distributions.
The network in SimMobility ST is composed by a road network layer, a pedestrian network layer and a public transportation layer. The road network layer is composed by (1) Nodes, (2) Links, with (3) Segments, (4) Polylines, and (5) Lanes. Connectivity attributes is assured by (6) Lane Connectors, (7) Turning Groups, (8) Turning Paths and (9) Conflict Points.
Nodes represent intersections or source/sink for trip chains. They are used for Link definition in route-choice and for the detailed characterization of intersections. Links are directional roads that connect Nodes and are composed by Segments. The latter are road sections with uniform geometric characteristics (speed limit, design speed, grade). Each segment as a fixed number of Lanes, each with its specific lane rules (lane-changing regulation and use privilege). Polylines determine the shape for the Segment and Lane Connectors define the connectivity between Segments. At the Node level, Turning Groups, Turning Paths and Conflict Points can be defined. Turning Groups define the connectivity between Links, while the Turning Paths define the connectivity between Lanes. Additionally, (10) Road Items are point specific features that can be added to the network to represent items on the road to which drivers must respond (e.g., traffic lights, bus stops, etc). This representation will be extended to account for parking in the next version of SimMobiltiy ST.
The core traffic model of SimMobility ST is based on MITSIM, an open-source microscopic traffic simulation application developed by the Massachusetts Institute of Technology. MITSIM moves vehicles according to route-choice, acceleration and lane-changing models. The acceleration model captures drivers' response to neighbouring conditions as a function of surrounding vehicles motion parameters. The lane-changing model integrates mandatory and discretionary lane-changes in single model. Merging, drivers' responses to traffic signals, speed limits, incidents, and tollbooths are also captured. The MITSIM lane-changing model was later enhanced for the specific purpose of integrating latent plans in the lane selection process, namely in urban arterial and in freeway with a large number of lanes.
Several additional enhancements were made to the MITSIM original driving behaviour: an enhanced reaction time formulation capable of explicitly model reaction time and perception delays for each person in a detailed and flexible manner; lateral movement during lane-change and within lane was included. For the current implementation, the lateral speed is kept constant during the lane-change, but the implementation of a sine function for lateral acceleration.
Finally, the design of a dedicated intersection behaviour model, based on the conflicts technique has also been implemented. The intersection behaviour starts once the intersection is visible to the vehicle. First, the vehicle identifies the intersection regime (no rules, priority, or controlled). If the intersection is not controlled, the subject vehicle identifies the neighbouring vehicles and the conflicting vehicles, the proceeds with a gap-acceptance based model that accounts for intersection-specific priorities (if any).
Within SimMobility ST, changes in planned trip chains have to be considered, including re-routing and re-scheduling. As the simulation is running, the agents need to find the routes for their trips and transform the activity schedule into effective decisions and execution plans. Agents may get involved in a multitude of decisions, not constrained to the planned set of destination, mode, path and departure time depending upon the network and their state in the simulation cycle. In the current implementation agent can re-route (as drivers or public transportation passenger) in the presence of congestion or the provision of control and information. Route choices are based on a probabilistic model that captures the impact of travel times and biases toward routes that use freeways over urban streets. The impact of real-time information on routing decisions is captured by a route-switching model in which informed drivers re-evaluate their pre-trip route choices based on the traffic conditions observed en-route. For perfect model integration with higher level simulators, the route-choice model used in SimMobility ST is the same as the one used in the SimMobiltiy MT framework.
The pedestrian behavior model focuses on the problem of how a pedestrian makes crossing-related decisions at different levels and at different points of times, when she/he walks along a given path to destination. Specifically, a crossing choice module is designed to determine where a pedestrian crosses the road, along a given path. A crossing timing decision module is designed to control when a pedestrian starts crossing the road, once she/he reaches a crossing point.
The movement of freight vehicles is typically considered microscopic traffic simulation models only by means of adapting driving behaviour parameters for heavy vehicle or by coupling external application with traffic microscopic simulation tools for impact assessment. Only few efforts to integrate the simulation of freight movements and logistics with traffic and mobility simulators can be found. SimMobility ST is the first microscopic simulator that integrates commodity specific movements with detailed traffic models. Similar to the individual trip-chain input, SimMobility ST allows commodity specific trip-chains. The commodity entity was specified for this purpose and freight drivers are assigned tours based on the commodities to deliver during the simulation period. A default tour generation model was developed but this will be relaxed and linked to a freight operator controller, which typically represents a carrier. Freight vehicles and drivers will then be assigned to a specific freight operator and a set of delivery stops specified as Road Items in the network. Decisions on the freight vehicle tours can be made by the freight operator controller or the driver himself.