7. IntersectionBehavior
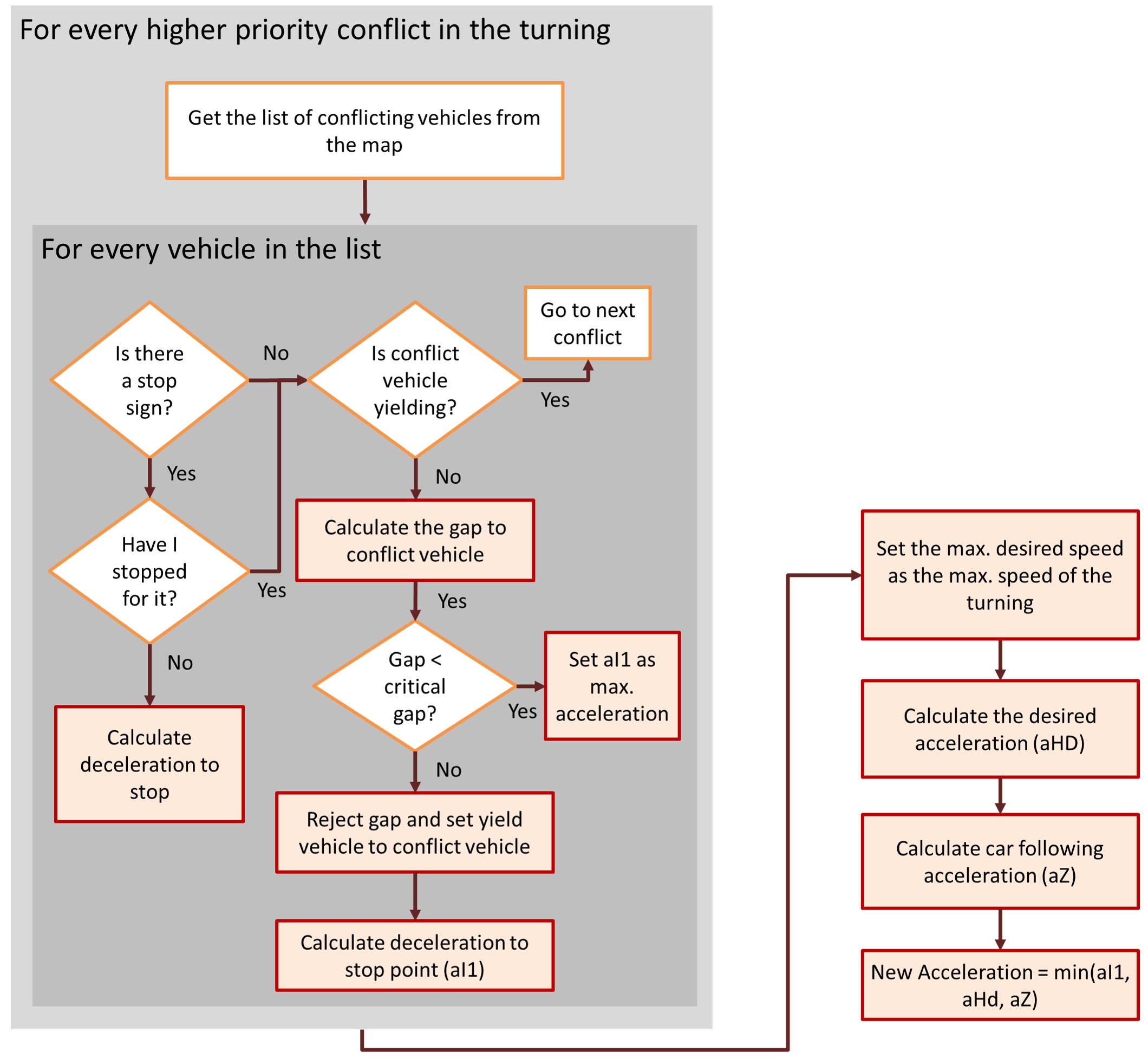
The model for intersection driving is based on the 'Proactive Anticipatory Gap Acceptance' model used in MITSIMLab. The model works in the following manner:
- Tag a vehicle once it reaches within the stopping distance from an intersection. The stopping distance is based on the vehicle's current speed.
- Depending on the intended trajectory of the vehicle in the intersection (passing straight through, making a turn), set the desired speed of the vehicle. The desired speed is the maximum permissible speed for the given road sectin and the intended maneuver.
- Start considering gaps. This is done in the following:
-
Identify conflict vehicles
- Identify movements that have higher priority than the tagged vehicle.
- Identify the lanes that these movement will be using
- Identify the first vehicle in each short-listed
-
Predict gaps
- Based on the current speeds of the vehicles, calculate the arrival time of the conflict vehicles at the conflict zone
- Calculate the minimum gap using the shortest arrival time.
-
Evaluate gap and decide acceleration
- Accept the gap if it is greater than the critical gap, else reject it.
- If the gap is accepted, calculate the required acceleration. Otherwise, calculate the required deceleration.
Driving behavior at unsignalized intersection
SCATS (Sydney Coordinated Adaptive Traffic System) is one of the most popular traffic signal control systems used by many big cities in the world, including Singapore. Singapore introduced SCATS system in 1986, and it has been locally called GLIDE (Green Link Determining) system and was commissioned in 1988. GLIDE system has the same features as SCATS, but with local settings by Singapore Land Transport Authority.
In SCATS, intersections are grouped into sub-system which is considered as the basic element of control at the multi-intersection level consist of one or more intersections. Specifically in Singapore's GLIDE system, each region can have up to 128 sets of intersections, where these sets of intersections are grouped into sub-systems. There are several rules for the control strategy for sub-systems:
- All the cycle length and split plan voting is carried out at the critical intersection (the intersection with the highest degree of saturation).
- Cycle length and splits at non-critical ones are controlled by the critical intersection.
- All the intersections in a sub-system share the same cycle length and are coordinated via offsets.
- Sub-systems can be linked to obtain coordinated control strategy, and may be combined into a larger sub-system to extend the linking.
The most important traffic parameter used by SCATS adaptive signal control is degree of saturation (DS). SCATS optimize the signal control such that all the approaches will have equal DS. It is defined as the ratio of effectively used green time to the total green time of each lane, approach or link, which can be denoted as follows:
where g' is the effective green time; g is the total available green time. Here, g' is denoted as follows:

where T is the total space time during the green time, t is the standard space time under saturated flow for each vehicle, n is the number of spaces.
SCATS collects traffic data via the loop detectors embedded in the surface of the road in front of the stop-lines of traffic signal controlled junctions. Space time is the duration of time in which the loop detectors does not detect the presence of vehicles. If the vehicle cross the stop line at a saturation flow, the total space is equal to the sum of the standard space hence g'=g since T=t*n and DS=1. In other words, if the traffic is less than the saturation flow then T>t*n, g'<g and DS<1, when the traffic is completely congested then T<t*n, g'>g and DS>1. SCATS uses space time as the basic parameter which is able to avoid involving the vehicle length into the estimation DS.
Cycle length is one the primary variables in traffic signal timing, which is defined based on other variables such as phase, interval and split. The definition and relationships between these variables are:
- Interval: A discrete portion of the signal cycle during which the signal indications remain unchanged.
- Phase: The portion of the signal cycle allocated to any single combination of one or more traffic movements simultaneously receiving the right-of-way during one or more intervals.
- Split: The percentage of a cycle length allocated to each of the various phases in a signal cycle
- Cycle length: The time required for one complete sequence of signal intervals (phases). Cycle length for a specific intersection does not change over time in fixed-time traffic signal control system, while it changes with the DS to balance the traffic load on each approach in adaptive control system. Thus, the actual length of green-time available depend on cycle-length and the split plan, in other words a heavier traffic demand would desire longer cycle-length.
SCATS carries out adjustment not only to cycle length but also the split plans in response to the detected demand and capacity. For each intersection or a group of intersections, the traffic controller will generate certain number of split plans for selection. Normally, selection is from 7 possible plans for 2 phases intersection and 37 possible plans for 3 and 4 phases intersections. Similar to cycle length, split plan is selected based on DS, in order to obtain approximately equal DS for all the approaches. Available split plan will be voted by the nominated approach's DS, the split plan wins the most votes in the last certain number of cycles will be selected for next cycle length. The selected split plan will extend the phase to maximize the capacity on an approach with largest DS, at the expense of increasing DS and delay on the other approaches of the intersection.