Wheel_Encoders_for_DFRobot_3PA_and_4WD_Rovers_(SKU_SEN0038)

This encoders are designed for DFRobot 3PA and AWD Rovers. It can give you the rotation degree of the wheels. Encoder uses non-contact method to convert the angular displacement signals. Best fit with Micro DC Geared Motor. It includes encoders, plastic tube, paper-mediated gasket etc.
Voltage:+5V Current:<20mA Resolution:20 PPR Weight:20g
// #
// # Editor : Lauren from DFRobot
// # Date : 17.01.2012
// # Product name: Wheel Encoders for DFRobot 3PA and 4WD Rovers
// # Product SKU : SEN0038
// # Description:
// # The sketch for using the encoder on the DFRobot Mobile platform
// # Connection for Uno or other 328-based:
// # left wheel encoder -> Digital pin 2
// # right wheel encoder -> Digital pin 3
// # Note: If your controller is not 328-based, please check https://www.arduino.cc/en/Reference/AttachInterrupt for proper digital pins.
#define LEFT 0
#define RIGHT 1
long coder[2] = {
0,0};
int lastSpeed[2] = {
0,0};
void setup(){
Serial.begin(9600); //init the Serial port to print the data
attachInterrupt(LEFT, LwheelSpeed, CHANGE); //init the interrupt mode for the digital pin 2
attachInterrupt(RIGHT, RwheelSpeed, CHANGE); //init the interrupt mode for the digital pin 3
}
void loop(){
static unsigned long timer = 0; //print manager timer
if(millis() - timer > 100){
Serial.print("Coder value: ");
Serial.print(coder[LEFT]);
Serial.print("[Left Wheel] ");
Serial.print(coder[RIGHT]);
Serial.println("[Right Wheel]");
lastSpeed[LEFT] = coder[LEFT]; //record the latest speed value
lastSpeed[RIGHT] = coder[RIGHT];
coder[LEFT] = 0; //clear the data buffer
coder[RIGHT] = 0;
timer = millis();
}
}
void LwheelSpeed()
{
coder[LEFT] ++; //count the left wheel encoder interrupts
}
void RwheelSpeed()
{
coder[RIGHT] ++; //count the right wheel encoder interrupts
} Step1:
Step1:
 Step2:
Step2:
 Step3:
Step3:

| '''Q. '''The feedback value is full that the Serial monitor is always printing value around 25903 and 25344, no matter of the motor running or not. |
'''A. '''The first parameter in the interrupt function ' attachInterrupt ' means the interrupt number that is just number 0 and 1, not the interrupt pin number.read more
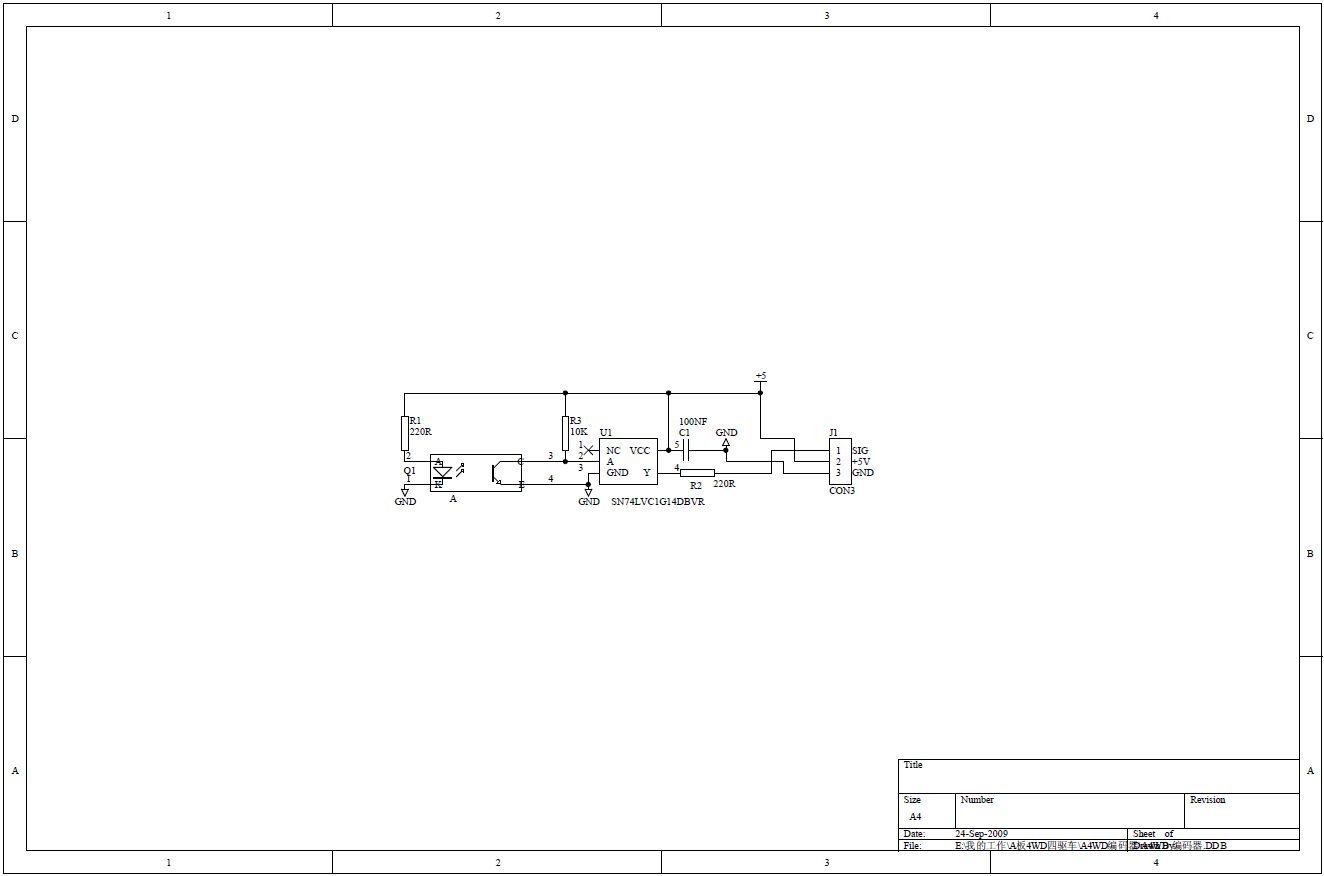
Encoder Schematics
 shopping wheel encoders for dfrobot 3pa and 4wd rovers (sku:sen0038) category: Product Manual category: SEN Series category: Motors-Servos category: source
shopping wheel encoders for dfrobot 3pa and 4wd rovers (sku:sen0038) category: Product Manual category: SEN Series category: Motors-Servos category: source
{kind=link}